1 引言
起重機不僅是將來正常生產時絕對不可缺少的重要設備,而且作為廠房興建過程中的設備安裝過程中的重要工具。故需要提前設計和製造,因此有必要事先對起重機的電控系統的控制方案進行認真地研究。下述某鋼鐵企業準備新建一條2250熱軋生產線,年產量500萬噸。我們調研了相關熱軋廠起重機的應用情況並和起重機電氣成套商的交流后,摒棄原以前控制方式中不合理的部分,而採用優化先進的控制理念,以便更大的發揮出起重機的性,保證起重機最佳運行特提出了如下方案。
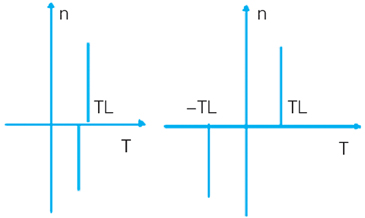
圖1 起升機構和走行機構機械特性
(tl-力矩,n-速度)
2 2250熱軋起重機功用
起重機是專門用來起吊和短距離搬移重物的一種生產機械,通常也稱為吊車、行車或天車。熱軋起重機在熱軋廠區雖然不是關鍵設備,但也算很重要的設備。其功用是搬運板坯、鋼卷,軋機設備檢修、電機吊裝、軋輥磨削和軸承更換等。2250熱軋共設計起重機28台,根據應用場合和要求級別不同,主要技術參數和控制要求如表1所示。
註:以上起重量不包括吊具的重量,板坯庫一跨行車考慮增加電磁吊
從上表可以看出,熱軋廠的起重機一般起重量不大,但環境溫度高,工作制級別高。尤其是板坯庫和鋼卷庫的幾台起重機為a7工作制,這註定了這幾台行車在設備選型製造和控制上要特殊考慮。
3 2250熱軋起重機的控制方法與策略
根據以上機械配置和要求,電氣系統需要做相應的配置,完善相關功能,包括供電、驅動、制動和保護功能。
3.1 起重機 電
整個起重機是採用四根主滑觸線,通過集電器將三相電源和接地(pe)線送到移動的起重機上。為了檢修方便,集電器要帶滑線脫開裝置。電源首先連接到一個吊籠中的電源進線箱中,再連到置於行車箱梁中電氣室內的低壓分配盤上。根據不同應用,在低壓盤中設置多路開關,為行車所有電氣設備供電。包括電機主電源,控制電源(plc),吊鉤、照明、檢修電源、空調電源等。由於起重機的小車是移動式工作的,一般採用軟電纜(少量地方用硬質滑觸線)供電,大車在滑觸線上移動、小車沿大車上的導軌移動時,軟電纜可以隨著伸展和疊卷,不至於擠壓損傷。
3.2 起重機電機的驅動方式
對於起重機來說,由於具有的重要性,屬於特種設備,對電氣傳動的要求很高。基本要求有:調速、平穩或快速起制動、糾偏、保持同步、機構間的動作協調、吊重止擺等。
由於起重機的起升和走行有不同的運行特性,因此對他們的控制方式也是不一樣的。起升和走行機構全部是恆轉矩負載。起升機構具有位能特性,上升運行時,電動機處於電動運行狀態,而在下降運行時,電動機總是處於超同步運行狀態。而走行機構具有反抗特性。在不計損耗情況下二者機械特性圖如圖1所示:
上圖中左所示為起升機構的機械特性,起升電機運行在一、四象限,表示整個運行過程中,負載保持不變,但運轉方向發生了變化。右所示為走行機構機械特性,走行電機運行在一、三象限。起重機在工作過程中要能夠適應頻繁正向、反向、啟動、運行、停車、制動。
起重機動作分為起升和走行,從電氣傳動上來看,主要有兩種控制方式如圖2所示。
以前起重機電機採用繞線電機,交流接觸器控制電機啟動、正反轉,通過切二次電阻方式來達到電機啟動和調速的目的。後來出現了定子調壓方式,可啟動平穩,減小衝擊電流。但是由於採取降壓調速,降低了起動轉矩。必須加裝速度編碼器實現速度閉環,滿足足夠的起動轉矩。以上兩種方式都是採用繞線式電機,轉子上串電阻切換,接觸器觸點燒損和電機滑環的損壞成為電氣系統的主要故障。隨著工業自動化的發展,plc和變頻器的應用越來越廣泛,中小型起重機上這兩種調速方式幾乎被變頻調速取代。因為交流變頻調速系統中,電機採用鼠籠式非同步電機,無滑環,沒有以上故障,而鼠籠式非同步電機更適應環境惡劣的工作場所,有非常好的調速性能且故障率很低,因此交流變頻調速近年來在起重機上也越來越得到廣泛應用。實際上,由於目前大容量的變頻調速系統的價格還偏貴,以及變頻器高的安裝環境要求制約了變頻調速技術在起重機上的應用。
我們經過與起重機廠交流、去同類企業考察,對起重機的控制方式有了一個明確的方向。針對錶1中的起重機,除了加熱爐上料跨和加熱爐跨起重機外,其他起重機的大車走行、小車走行、主起升和副起升等所有電機都將採用交流變頻調速。因為加熱爐上料跨和加熱爐跨起重機的工作制比較低,而且只承擔少量的檢修任務,因此決定採用常規的轉子串電阻調速方法,可以降低控制費用。另外,起重機主起升由2台電機驅動的,每台電機由一套變頻器傳動,在一台電機或一套變頻器異常時,仍可維持短時工作;對於大車,根據速度、載重量不同,有2種驅動型式,即兩角驅動和四角驅動。當大車採用四角驅動時,考慮到安全性能,四角驅動的四台電機由2套變頻器來傳動,在一台電機或一套變頻系統出現異常時,仍會維持短時工作。
從整個起重機電氣系統來看,考慮到調速精度和定位的不同要求,起升電機安裝測速編碼器,實現速度閉環矢量控制,而大、小車一般不安裝測速編碼器,採用速度開環矢量控制。當板坯庫起重機採用全自動方式運行時,大小車電機也需要安裝編碼器,進行精確定位。
有了變頻裝置和plc后,就可以充分利用變頻器內部的故障自診斷功能,再結合plc的遠程通訊、現場信息採集功能可實現整車故障自診斷,大大減輕維護人員的檢修工作量。通過其他廠的應用和交流情況,這種變頻控制方式可使起重機效率提高40%以上,故障率下降90%以上,勞動強度下降50%以上。
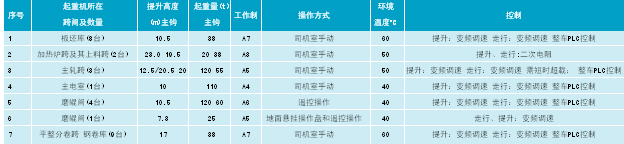
表1 主廠房起重機主要技術參數和要求
3.3傳動系統制動方式分析
電機調速系統的制動方式常規有能耗制動,反接制動和回饋制動等,其中回饋制動節能效果最佳。根據不同的制動方式,變頻器的配置也是不一樣的,如果採用回饋制動,則整流器可採用igbt功率元件,或者採用可控硅全控橋。如果採用能耗制動的話,則整流裝置可採用二極體功率元件,並採用外接電阻器來消耗能量。
另外,由於起重機電機的供電是通過集電器在摩電道上滑動取得的,由於摩電道的接觸不可靠,因此起重機上很少採用。如集電器上有碳粉、集電器接觸不良等容易導致供電有跳變。如果採用能量回饋的話,也會造成多餘能量回饋不順暢,產生過電壓。因此在本項目上還是採取外接制動電阻,能耗制動方式。由於採取變頻調速,能耗制動的電阻和繞線電機的切電阻相比,阻值明顯減少。
3.4系統保護
由於起重機是一種特殊設備,在安全上必須要保證,這樣無論從電氣還是機械,都對起重機安全形度上多加以考慮。因此採取了多種保護措施。主要有:
3.4.1制動器
制動器是起重機最重要的保護措施之一,根據制動器能介不同,有電磁式和液壓式等,制動器安裝位置一般在高速軸端。在我們以前的項目中,有個別起重機上配置的是電磁製動器,但大部分採用的是液壓制動器。而從起重機的安全係數考慮,起重機的起升裝置一般採用盤式制動器,而走行採用輪式制動器。在其他行業對起重安全要求特別高的,還會在低速端設置安全制動器。本項目中,我們都採用的是液壓制動器。
3.4.2超載限制器
超載限制器是起重機的超載保護裝置,當吊起重物時,不能超過設計重量或長時間超過某個重量,不然會影響設備的壽命,甚至對設備造成損壞,因此常規在捲筒軸下設置超載限制器。根據當前顯示重量並結合進行相應工況,在超過額定重量后快速切斷吊車吊鉤起升迴路,使吊車不能起吊重物,從而達到保護吊車及操作人員安全的目的。超載限制器的報警和動作值可以設定。
3.4.3防撞裝置
熱軋廠除了主電室跨只有一台起重機外,其他跨上都是有多台行車可同時運行。為了避免行車運行時發生碰撞,在行車上設置了紅外線防撞裝置(雙向),防撞限制距離可調,帶聲光報警功能。而且在每台起重機上配有撞尺,作為終端限位裝置,同樣對起重機的安全運行起到決定性的作用。
3.4.4零位保護
在起重機的司機室控制台上的手柄設有零位觸點,通過它和plc內部的聯鎖關係,達到零位保護的目的。當機構開始運轉和失壓后恢復供電時,即使操作手柄置於工作位置上,控制迴路亦處於分斷狀態而不能形成閉合迴路,必須先將控制器手柄置於零位后,機構的電動機才能起動。
3.4.5登機門的報警和保護
由於起重機是移動的,為安全起見,其他人員登機時必須先聯繫才行。因此在登機門旁和操作室都設置有登機請求和應答裝置,甚至還在操作室裝設有視頻或語音提示裝置。當有人需要登機時,通過聯繫確認后,停止行車運行,實現對上下行車的相關人員的安全保護。
3.4.6其它保護
由於保護很多,另外還有傳動系統上的一些保護,如超載、超速、缺相、欠壓、過流、過熱、接地等。此外,還有為安全考慮的用於起重機的上升行程限位器-重鎚限位、三相電源指示、起重機啟動閃爍功能、座椅在位指示等保護。
3.5特殊功能應用
3.5.1遙控操作
磨輥間起重機是主要用來更換軋輥,更換軸承用,由於他的工作特點是會集中在某段時間工作頻度大。尤其在更換軋輥軸承時移動範圍小,要非常仔細,稍不小心就會造成設備損壞,因此採取微動。於是取消了司機操作台,代之以線控和無線遙控操作。
3.5.2地面監視系統
起重機是屬於特種設備,重物提升和設備的安裝高度很高,給設備人員維護帶來不便。為了使得維護人員能夠在地面上可方便對行車進行設備點檢,了解設備狀態和運轉情況,設置一套行車信息地面監測系統是很有必要的。隨著網路技術、無線技術的發展,這些實現手段變得可能和簡便了。
3.5.3防搖系統
起重機在運行過程中,會由於速度的不均勻導致吊物時不能準確定位,需要更長的時間,為了減少大車和小車的擺動引起所吊物體的擺動,就需要採取消除擺動的方法,傳統的方法中有人工消擺,機械消擺,而現在更多的有電子防擺。人工消擺是靠操作工的操作手法來實現,而機械消擺主要靠起重機的硬體設計,如鋼絲繩的纏繞方式等,而電子防擺則主要就是基於軟體模型,通過一種演算法,把負載的速度給定或位置給定轉換成小車或者大車的速度給定,用來控制小車或大車的運動,使負載以給定的速度連續平滑的運動調節。
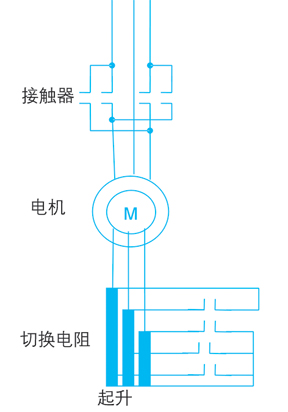
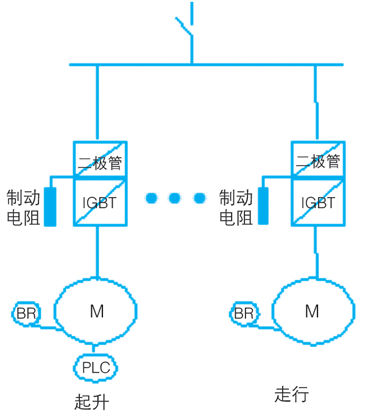
圖2 常規繞線電機和變頻電機控制圖
4 結束語
隨著新的變頻技術和網路技術的發展進步,電氣控制系統逐漸走向智能化、網路化,因而操作使用起來更人性化,維護更便利,這將成為行車控制的發展的必然趨勢。
作者簡介
周靈強 男 高級工程師,現就職於寶山鋼鐵集團公司,從事電氣自動化方面的技術工作。
參考文獻
[1] 鍾述文.交流變頻調速技術在寶鋼寬厚板廠起重機上的應用[j].變頻器世界,2005.
作 者:寶山鋼鐵集團公司 周靈強