標準的 1.8 度步進電機(圖 27)由疊片結構的帶齒定子線包(帶有兩個中心抽頭線圈)和外部的 50 極混合轉子構成。 轉子由一塊軸向磁化的永磁鐵構成,帶有兩個疊片鐵碗。 與直流電機不同,其電機繞組中使用的電流會產生一個轉矩,該轉矩阻礙旋轉(保持轉矩)。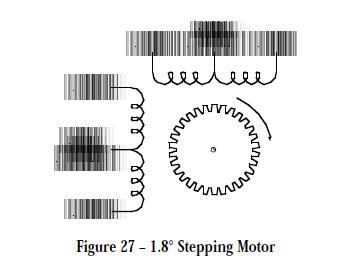 步進電機
步進電機
圖 27 1.8???步進電機
但是,通過開關線圈在特定的四步序列中進行開關(圖 27a),轉子將在每次電流改變時「步進」1.8 度。 還可以選擇八部序列,(圖 28b),其進一步將解析度翻倍,提高到 0.9 度(每轉 400 步)。 因此旋轉可以通過簡單的使用一個合適的繞組電流序列來實現。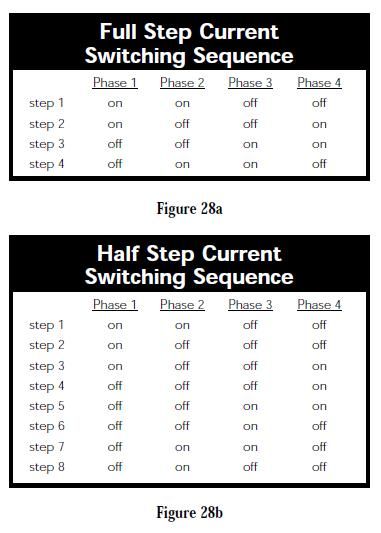 步進電機
步進電機
圖 28a 整步長電流開關序列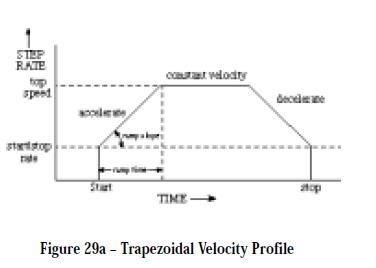 步進電機速度曲線
步進電機速度曲線
圖 28b 半步長電流開關序列
有幾個因素使這個原本簡單的模式複雜化了。 啟動起來的步進電機會表現出旋轉剛性,抵抗來自當前位置撓性影響。 耦合了轉子的旋轉慣性,該彈簧質量系統會產生一個 50 到 150 Hz 範圍的基頻諧振。 步進速率接近這個固有頻率運行時,雜訊和振動會增加,還可能導致電機失步(喪失位置)。 微步進的使用——已經在所有 NEAT 步進電機驅動器上實現——有效的減小或消除了這種影響。
由於電機轉子的慣性,步進速率是有限制的,以使固定電機避免失速或無法跟隨步進序列。 該速率稱為止-動(STOP-START)速率,是電機保持轉矩、轉子慣性和負載慣性的函數。 其範圍從每秒 400 到 1000 整步(2 到 5 轉每秒);對於請負載的 23 框架電動機,典型值為 700 整步/秒。 如果要使步進速率超過此值,就需要將步進頻率增加,或將速率從止-動速率以下緩慢提升到希望的最高速率。 啟動頻率通常要選擇大於基本諧振頻率、但安全的低於止-動速率,用於 23 框架電機的典型值是 400整步/秒(2 轉/秒)。
除了抵抗高步進速率下的瞬時啟動,如果脈衝序列突然中止了,轉子(和負載)慣性還可能會導致過沖。 因此,停止點之前必須提前準備,使電機在停止前緩慢降到合適的頻率(典型值也是 400整步/秒)。 圖 29a 給出了一次移動的整體速度曲線;短程運動不會達到程序設定的最高速,而會形成三角運動,見圖 29b。 允許的加速度和減速度值由電機的轉矩、驅動類型和總慣性決定(見轉矩和驅動力要求)。
Figure 29a - Trapezoidal Velocity Profile
圖 29b 三角速度曲線
在實現了合適的啟動-停止速率和加速度/減速度變速之後,下一步需要關心的通常是可實現的最大轉換速率。 這是由步進電機繞組的電感決定的。 由於電感的存在,電機繞組中的電流不會立即提高到其預期值 V/R。而是會遵循以下公式:
I= V/R x (1-e?R/(Lt) )
開始的時候是線性的,然後會漸進的接近由繞組電阻和應用的電壓所確定的水平。 在低步進速率的時候(圖 30a),繞組電流有足夠的時間到升高到完整值,並提供額定轉矩。 但隨著步進速率的提高,繞組中的電流在關斷前只能提升到完整轉矩值時的幾分之一(圖 30b)。 其結果就是,電機轉矩隨著步進頻率的提高而下降;最終,電機將沒有足夠的轉矩來驅動負載、發生失速。 速度-轉矩曲線(圖 31)可以分成兩個區域,在低速區轉矩恆定,而在高速區轉矩和頻率成反比。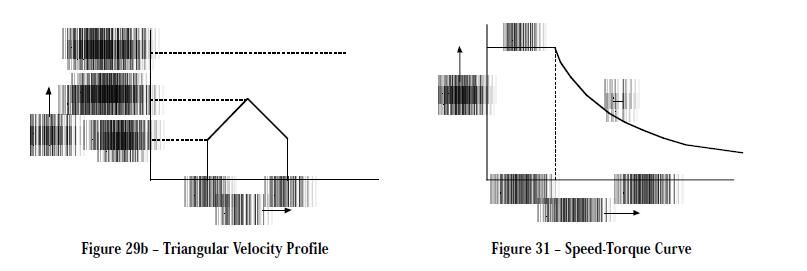 step
step
Figure 30a - Low Step Rates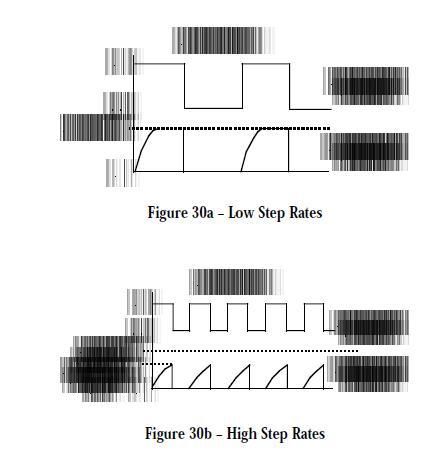 高步進速率
高步進速率
圖 30b 高步進速率
圖 31 速度-轉矩曲線
驅動步進電機面臨的挑戰,是要使電流提高的速度儘可能的快,以提供更大的高速轉矩。 有一種技術被稱為單極 L/R,將電流引到每個線圈的中心抽頭上,並交替的將每個繞組的一端切換到地(圖 32a)。 單極 L/R 驅動方式通過從比起額定值高出數倍的電壓上運行電機,而繞過了緩慢的電流建立過程。 該方式需要用非常大的降壓電阻,將電機電流限制在額定值上。 增加電阻器的效果是使負載的阻性更強,相對降低固有的感性(公式中 L/R充電時間),這可以使電流建立得更快。 該技術在實際中應用很有限,因為會導致在降壓電阻上形成巨大的功耗,已經被斬波驅動代替了(見下文)。
圖 32a L/R 驅動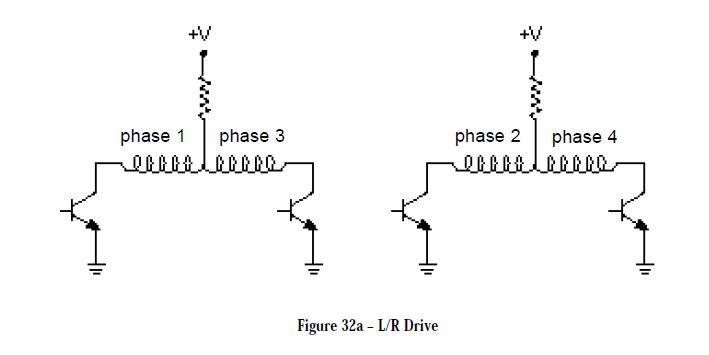 ln
ln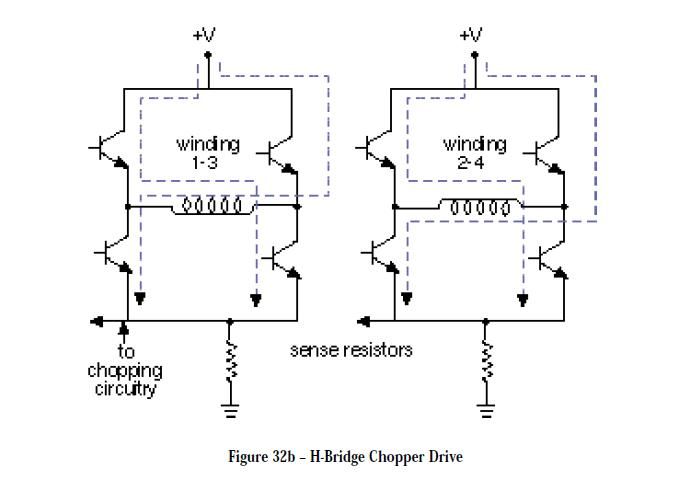 zx
zx
有一種更加先進的技術,被稱為雙極斷路器,這種方式要在一個半橋(H bridge)配置中使用多出一倍的晶體管(圖 32b)。 通過打開對角相對的晶體管,電流可以從兩個方向上流過線圈。 一般來說,每個線圈只有一半會被驅動(中央抽頭到某一端),也稱為整線圈對半線圈。 為了在繞組內獲得可能達到的最快電流提升速度,驅動電壓要設置為額定線圈電壓的 10 到 20 倍高。 這樣就需要用一個感應電阻,在達到額定電流的時候切斷電機電流。 之後,電流會通過繞組再循環,直到低於感應門限,晶體管就又再次打開。 這樣電機電流實際上會被「切斷」,典型頻率為不可聞的 20KHz頻率,提供了最佳的高速性能,而沒有超過額定的電機電流值。 所有的 NEAT 步進電機驅動都應用了雙極斷路器,以及微步進技術;我們還提供單獨的驅動模塊(MDM7 和 HRDM20),OEM 用戶可以將其安裝到自己的系統中。 所有 NEAT 斷路器驅動器都結合了對中等不穩定性——一種潛在嚴重的步進電機諧振——的全面保護(見中等諧振)。
當運行在最佳性能上時,
可以預料到步進電機會有運行發熱。 同時可能需要告誡一下第一次使用的用戶,假定電機線圈的額定溫度是 125 攝氏度(華氏257 度),機箱溫度在華氏 100 到 150 度是沒有關係的。 涼的或微溫的電機實際上是運行在峰值性能以下的。 有一些控制器(例如 NEAT 100 和 300 系列)結合了自動邏輯電路,用以在沒有運動的時候降低電流和發熱。 另一個普遍關心的問題是步進電機的失速。 雖然是任何應用中都非常不希望出現的情況,但失速(即使是持續較長一段時間)並不會導致電機或驅動器損壞。