運動分析模塊(Scenario for motion)是UG/CAE模塊中的主要部分,用於建立運動機構模型,分析其運動規律。通過UG/Modeling的功能建立一個三維實體模型,利用UG/Motion的功能給三維實體模型的各個部件賦予一定的運動學特性,再在各個部件之間設立一定的連接關係既可建立一個運動模擬模型。
UG/Motion模塊可以進行機構的干涉分析,跟蹤零件的運動軌跡,分析機構中零件的速度、加速度、作用力、反作用力和力矩等。運動分析模塊的分析結果可以指導修改零件的結構設計(加長或縮短構件的力臂長度、修改凸輪型線,調整齒輪比等)或調整零件的材料(減輕或加重或增加硬度等)。設計的更改可以反映在裝配主模型的複製品分析方案中,再重新分析,一旦確定優化的設計方案,設計更改就可反映在裝配主模型中。
一、運動方案創建步驟
1.創建連桿(Links);
2.創建兩個連桿間的運動副(Joints)
3.定義運動驅動(Motion Driver)
無運動驅動(none):構件只受重力作用
運動函數:用數學函數定義運動方式
恆定驅動:恆定的速度和加速度
簡諧運動驅動:振幅、頻率和相位角
關節運動驅動:步長和步數
二、創建連桿
創建連桿對話框將顯示連桿默認的名字,格式為L001、L002…….L00n
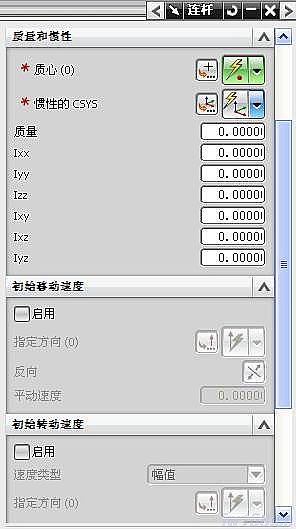
質量屬性選項:
質量特性可以用來計算結構中的反作用力。當結構中的連桿沒有質量特性時,不能進行動力學分析和反作用力的靜力學分析。根據連桿中的實體,可以按默認設置自動計算質量特性,在大多數情況下,這些默認計算值可以生成精確的運動分析結果。但在某些特殊情況下,用戶必須人工輸入這些質量特性。
固定連桿:
人工輸入質量屬性,需要指定質量、慣性矩、初始移動速度和初始轉動速度。註:必須選擇好質心並且輸入質量的數值,才能定義質量屬性。
三、創建運動副
運動副就是將機構中的連桿連接在一起,從而使連桿一起運動。在運動副創建前,機構中的連桿是在空間浮動的,沒有任何約束,具有6個自由度。運動副創建后,會約束一個或幾個自由度,運動副具有雙重作用:允許所需的運動和限制不要的運動。
運動副的創建步驟:
1) 創建運動副要約束的第一個連桿
2) 創建運動副第一個連桿的原點和方向
3) 創建運動副要約束的第二個連桿
4) 創建運動副第二個連桿的原點和方向
連桿選擇技術:
UG運動分析模塊用首選選中的對象判斷要創建運動副的原點和方向。
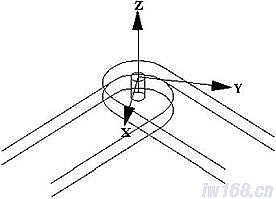
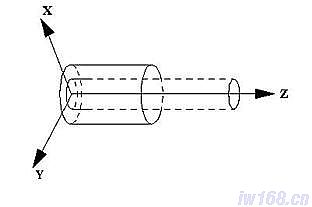
如果選中的對象是圓弧或圓,則運動副的原點設在圓弧或圓的圓心,運動副的Z軸垂直於圓的平面。
如果首先選中的對象是直線,則運動副的原點設定在直線最近的控制點上,且運動副的Z軸方向平行於直線。
如果選中的對象不能夠確定運動副的原點和方向,則需手工定義運動副的原點和方向。
運動副方向決定其自由運動的方向。轉動副(旋轉副和柱面副)按右手螺旋法則繞運動副的坐標系的Z軸運動。線性運動副(滑動副)沿Z軸移動。
咬合連桿:設計位置和裝配位置不一致。
運動驅動:用來定義運動副上的運動驅動。
常見運動副類型如下:
1. 旋轉副
它有兩種形式:一種是兩個連桿繞同一軸作相對的轉動,另一種是一個連桿繞固定在機架上的一根軸進行旋轉
旋轉副有一個繞Z軸轉動的自由度,旋轉副不允許兩個連桿之間有任何移動。
旋轉副可以定義一個運動輸入,旋轉的正向由右手法則確定。
一個旋轉副去掉5個自由度。
相連的兩桿不在裝配位置(裝配位置和設計位置不一致),選擇複選框Snap Links(咬合連桿)
可以規定旋轉副的運動極限:
2. 滑動副

可以實現一個部件相對與另一部件的直線運動,它有兩種形式:一種是滑塊為一個自由滑塊,在另一部件上產生相對滑動;一種為滑塊連接在機架上,在靜止表面上滑動
滑動副連接兩個連桿,有一個自由度,連桿之間不允許有轉動。
滑動副可以定義一個運動驅動,移動的正方向是正Z軸方向。
一個滑動副去掉5個自由度。
一般來說,滑動副的原點可以位於Z軸的任何位置,滑動副都會產生相同的運動。
較好的方法是將運動副的原點放在滑動副模型的中間。
可以規定滑動副的運動極限
3. 柱面副
實現了一個部件繞另一個部件(或機架)的相對轉動 。柱鉸連接也有兩種形式:一種是兩個部件相連,另一種是一個部件連接在機架上 。
柱面副連接兩個連桿,有2個自由度,1個移動自由度和1個轉動自由度。
不可以定義運動驅動
一個柱面副可以由一個旋轉副和一個滑動副替代。
一個柱面去掉4個自由度。
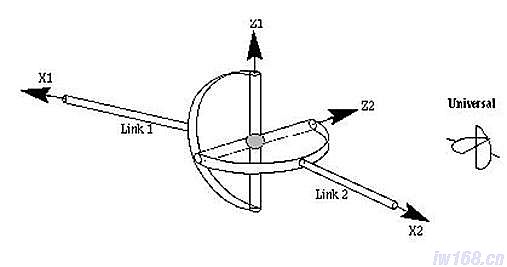
4. 萬向節
萬向接頭實現了兩個部件之間可以繞互相垂直的兩根軸作相對的轉動,它只有一種形式必需是兩個連桿相連。
萬向節可以連接2個成一定角度轉動連桿,萬向節有2個轉動自由度。
萬向節不能加驅動,不可規定萬向節的運動極限。
萬向節的原點必須位於ZY的交點,要避免產生摺疊(小於90度的)萬向節,或在期望的運動範圍內會摺疊的萬向節。
如果連桿的裝配位置與設計位置不一致,則不能採用此運動副。
確定X1軸的方向是確定萬向節方向最簡單的方法。用這種方法為系統設定萬向節的旋轉縱軸,可不必關心Y軸和Z軸的初始方向,因為Y軸和Z軸在旋轉方向上可自由移動,故明確確定Y軸和Z軸的初始方向是不可能的。
„ 第一個連桿的Z軸方向控制第二個連桿的Z軸方向,它們會相互成90度。
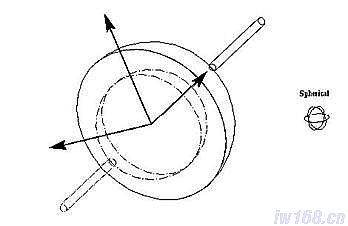
5. 球面副
實現了一個部件繞另一個部件(或機架)作相對的各個自由度的運動,它只有一種形式必需是兩個連桿相連。
球面副連接兩個連桿,有三個旋轉自由度
球面副不能加驅動,不能規定其運動極限。
球面副的原點位於球和鉸套的公共中心點。球面副沒有方向,當創建球面副時,只需指定連桿和球面副的原點。
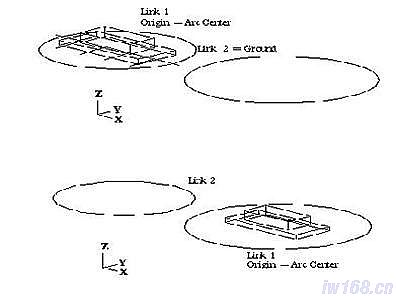
6. 平面副
平面連接可以實現兩個部件之間以平面相接觸,互相約束
平面副連接兩個連桿,有3個自由度---2個移動自由度和1個轉動自由度。兩個連桿在相互接觸的平面上自由滑動,並可繞平面內的法線自由轉動。
平面副不能定義運動驅動
一個平面副去掉3個自由度
7. 螺旋副
螺旋副本身不能對兩個連桿進行約束。柱面副代表螺紋的一對螺栓和螺母,當柱面副和螺旋副結合后,柱面副提供約束,將連桿定位於圓柱/螺旋副的軸線上。
螺旋副提供螺紋,因此螺旋副和柱面副結合起來即可模擬螺母在螺桿上的運動。
不能給螺旋副添加驅動或極限。
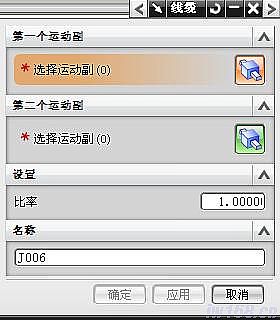
8. 線纜副
線纜副定義滑動副之間的相互關係。當一個滑動副移動時,相應的另一個滑動副也跟著移動,其運動關係可以是1:1的等速,同方向的運動關係,也可以定義其他的運動關係------一個快、一個慢及兩個滑動副運動方向相反。
該運動副可以用來模擬電纜、滑輪等。
線纜副不能定義驅動,但可以對其中的一個滑動副加驅動。
不能定義線纜副的運動範圍。
比率:第一個滑動副和第二個滑動副的運動速度之比。
比率為正,第二個滑動副的運動方向和第一個滑動副的運動方向相同,反之相反。
比率小於1,則第二個滑動副的運動速度大於第一個滑動副的運動速度。
線纜副去掉2個自由度。
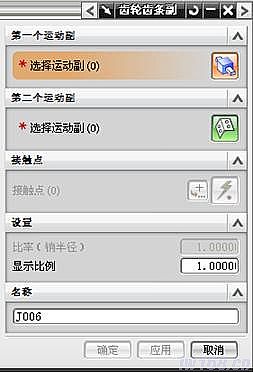
9. 齒輪齒條副
齒輪齒條副模擬齒輪和齒條之間的嚙合運動,選擇現有的旋轉副和現有的滑動副,即可創建齒輪齒條副並定義傳動比。
不能定義齒輪齒條副的驅動和極限,但可以給滑動副和螺旋副定義驅動。
Z軸平行於齒條的滑動方向,原點是齒輪齒條牙齒的接觸點。
滑動副和移動副須預先創建
比率參數等效於齒輪的節圓半徑,單位為部件文件的單位,它定義了第二個連桿相對於第一個連桿沿運動副Z軸方向的移動比率。
10. 齒輪副
齒輪副模擬一對齒輪,選擇連個現有的螺旋副即可創建齒輪副,並定義齒輪的傳動比。
不能定義齒輪副的驅動和極限,但可以給螺旋副定義驅動
齒輪的嚙合點即為齒輪副的原點。
比率參數即為齒輪傳動比,無量綱。
旋轉軸可以不平行,既可以創建錐齒輪。
四、創建力
作用力使物體產生運動,作用力具有大小和方向,根據其方向的不同性質,在模擬模塊中分為標量力和矢量力。
標量力是具有一定大小,方向隨運動連桿不斷變化的力。
矢量力是具有一定的大小,其方向保持不變的力。
五、創建彈簧和阻尼
彈簧是一個彈性元件,可給物體施加力,施加力的大小由胡克定律確定:
F為彈簧力,k為彈簧剛度,x為彈簧產生的位移。
彈簧創建步驟為:
選擇彈簧的第一個連桿
選擇彈簧的初始點
選擇彈簧的第二個連桿或單擊“確定”按鈕,彈簧固定到地
選擇彈簧的終點
輸入彈簧的剛度,默認值是1
輸入彈簧的自由長度,默認值是0
阻尼對物體的運動起反作用,消耗能量,逐漸降低運動響應,常和彈簧一起使用,控制彈簧的反作用力,使彈簧的運動比較緩和。
阻尼力是物體運動速度的函數,其作用方向與物體的運動方向相反,表示為:
其中F為阻尼力,c為阻尼係數,V為物體運動速度
阻尼創建過程為:
選擇阻尼的第一個連桿
選擇第一個連桿的阻尼附著點
選擇阻尼的第二個連桿,或單擊“確定”按鈕,阻尼附著到地。
選擇第二個連桿的阻尼附著點
輸入阻尼係數,默認值是1
六、3D接觸與碰撞
3D接觸可以用來建立實體之間的碰撞模型,當兩個實體建立接觸關係后,系統在每一步分析中檢查兩者之間的距離關係,一旦判斷出有接觸發生,求解器就計算出接觸力和接觸運動響應。接觸力計算公式為:

其中,F為接觸力,k為剛度,x為穿透深度,e為力指數。
七、圖表與電子表格
運動模擬模塊提供圖表與Excel電子表格功能,運動模擬結果可以在UG環境下繪製曲線圖形或進行表格形式的顯示。
圖表功能生成電子表格資料庫並繪出下列模擬結果:位移、速度、加速度和力。圖標功能是從運動分析中提取這些信息的唯一方法。
請求:位移、速度、加速度、力、電動機驅動
組件:
幅值(總值):只考慮線性運動。該選項給出一個合值或總值而不考慮沿各個特定方向的分量。以位移為例,該選項會給出從A點到B點的最小距離,而不考慮沿X、Y、Z軸方向的分量。
X、Y、Z:分別繪出沿X、Y、Z軸的線型運動值。這些選項允許將每個軸隔離開來單獨研究。
角度幅值:只考慮旋轉運動,給出一個總值或合值,而不考慮繞各個軸的角度分量。
歐拉角:用來描述剛體的定點轉動,用動坐標系相對於固定坐標系的三個角度來表達,動坐標系固連於剛體,並且隨剛體一起繞定點轉動,開始時兩坐標系重合。
歐拉角度1:動坐標系繞固定坐標系Z軸轉動的角度。
歐拉角度2:動坐標系轉到新位置后,繞其X1軸轉動的角度。
歐拉角度3:動坐標系轉到新位置后,繞其Z1軸轉動的角度。
相對和絕對
絕對:圖標顯示的數值是按絕對坐標系測量獲得的。
相對:圖標顯示的數值是按所選的運動副或標記的坐標系測量獲得的,當所選的運動副或標記的方向與絕對坐標系不一致時,就應選用相對參考坐標系。
運動函數:顯示結構中運動副所定義的運動驅動函數。
Y軸定義:選擇了“運動對象”設置了“請求”和“組件”后,就可以將該曲線繪製出來。Y軸將顯示這些曲線各自的值。
X軸定義:以時間作為X軸,默認值。也可以由用戶自定義。