1 平面四桿機構的類型及應用
連桿機構的特點:優點:運動副單位面積所受的壓力小且面接觸受力小,便於潤滑,磨損小;製造方便。缺點:設計複雜誤差大。工作效率低。
平面四桿機構的基本類型——鉸鏈四桿機構
1、曲柄搖桿機構
(1) 曲柄:1作360°周轉運動,
(2) 搖桿:3作往複擺動,主動件可以為曲柄,也可以為搖桿。右面機構中搖桿的擺角為60°,作小於360的運動
(3) 連桿:連接曲柄與搖桿的桿件
(4)連架桿:連接機架與連桿的桿件。
曲柄搖桿機構:兩連架桿中一個為曲柄另一個為搖桿的鉸鏈四桿機構
雙曲柄機構:兩連架桿均為曲柄的鉸鏈四桿機構
雙搖桿機構:兩連架桿均為搖桿的鉸鏈四桿機構
平行四邊形機構
平行四邊形機構是雙曲柄機構的一個特例。組成四邊形對邊的構件長度分別相等。從動曲柄3和主動曲柄1的迴轉方向相同,角速度時時相等
雙搖桿機構:
構件1和3都作往複擺動,一般主動搖桿作等速擺動,從動搖桿作變速擺動。
平面四桿機構的演化形式(Ⅰ)——含一個移動副的四桿機構
曲柄滑塊機構
正置曲柄滑塊機構
滑塊(slider)鉸鏈點的運動方位線通過曲柄轉動中心,滑塊動程(pitch)等於兩倍曲柄1的長度,無急回運動特性。主動件可以為曲柄,也可以為滑塊。
偏置曲柄滑塊機構
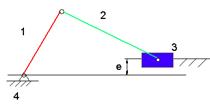
滑塊鉸鏈點的運動方位線不通過曲柄轉動中心,偏距(offset)為e,滑塊動程大於兩倍曲柄長度,有急回運動特性
導桿機構
轉動導桿機構
曲柄1和導桿3都能作360°周轉運動,主動曲柄作等速轉動,從動導桿作變速轉動,
擺動導桿機構

曲柄1作360°周轉運動,擺動導桿3作往複擺動,且有較大的急回運動特性

曲柄搖塊機構
移動導桿機構
構件2作往複擺動,構件4在滑塊中作往複移動。
2 平面連桿機構的工作特性
1、轉動副為整轉副的充分必要條件
急回運動和行程速比係數
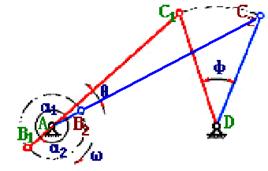
原動曲柄轉動一周過程中,有兩次與連桿共線,即重疊共線和拉直共線,搖桿兩個極限位置分別為C1D和C2D。
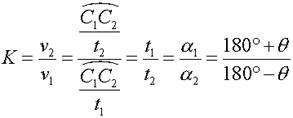
曲柄AB以等角速度ω順時針轉過α1角由位置AB1轉到位置AB2,搖桿從C1D擺到C2D,擺角為φ,所需時間為t1,C點平均速度為V1。當曲柄繼續轉過角α2,搖桿從C2D返回到C1D, 所需時間為t2,C點平均速度為V2。
因為α1>α2,t1>t2,所以v1<v2,搖桿往複擺動的平均角速度不相等。為提高機械的工作效率,通常使慢速運動行程為工作行程(正行程),而快速運動行程為空回行程(反行程)。這種返回速度大於工作行程速度的運動性質稱為急回特性
行程速比係數
來表示。
 壓力角與傳動角
壓力角與傳動角
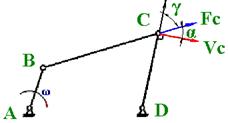
在不計運動副中摩擦力、構件質量和慣性力的情況下,機構從動件受力方向Fc和受力點速度方向Vc所夾的銳角α,稱為機構在此位置的壓力角
壓力角越小,機構的傳力性能越好,效率越高。
壓力角α的餘角稱為傳動角γ,即γ+α=90º
在連桿機構中,為了度量方便,常用傳動角γ來衡量機構的傳力性能。傳動角是指連桿BC與從動件CD之間所夾的銳角。γ與α互余。
大多數機構在運動過程中,傳動角是變化的。為保證機構具有良好的傳動性能,一般規定機構的最小傳動角γmin≥40º,在傳遞較大力矩時,應使γmin≥50º。
在鉸鏈四桿機構ABCD中,當∠BCD為銳角時,γ=∠BCD;當∠BCD為鈍角時,γ=180º-∠BCD
死點:搖桿CD為主動件。當機構處於連桿與從動曲柄共線的兩個位置時,出現了傳動角γ=0º,壓力角α=90º的情況。主動件CD通過連桿作用於從動件AB的力恰好通過其迴轉中心,不能使AB桿轉動,機構此位置稱為死點
飛機起落架機構
在機輪放下時,連桿BC桿與從動桿CD桿成一直線,機構處於死點位置,使降落更加安全可靠。
工件夾緊機構
工件被夾緊后,土黃色構件與分紅色從動構件成一直線,即機構在工件反力的作用下處於死點,可保證在加工時,工件不會鬆脫
3 連桿機構設計
已知:搖桿長度CD ,擺角φ,行程速比係數K
要求:設計曲柄搖桿機構
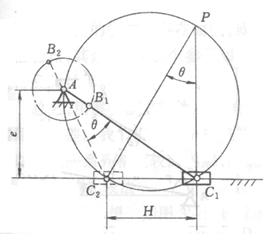
解:1、計算極位夾角θ θ=180(K-1)/ (K+1)
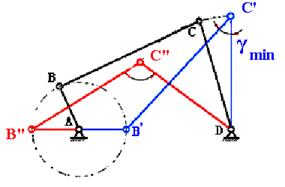
2、任取一點D為搖桿固定鉸鏈中心,作等腰三角形C1C2D,兩腰長度等於CD,∠C1DC2=φ
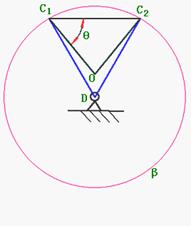
3、以C1C2為一條邊,分別作∠O C1C2=∠OC2C1=90°_θ。以O為圓心,OC1為半徑作圓β
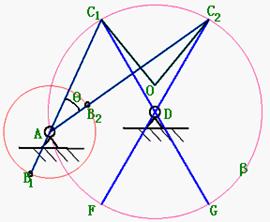
4、連接並延長C1D,交圓β於G點,連接並延長C2D,交圓β於F點。 圓弧C1F和GC2上任意一點A到C1和C2的連線的夾角∠C1AC2都等於極位夾角θ。曲柄軸心A點可在這兩段圓弧上選取
注意:曲柄軸心A不能在FG圓弧上選取,否則機構不滿運動連續性要求。 在C1F和GC2兩段圓弧上選取A點時,當A點越靠近F(或G)點時,機構最小傳動角將隨之減小。
5、A點選定后,四桿機構尺寸即確定。設曲柄長度為a,連桿長度為b,則
AC1=b-a
AC2=b+a
所以:a=(AC2-AC1)/2
b=(AC1+AC2)/2
2)對於給定行程速比係數K和滑塊行程H時,可以用同樣方法求出曲柄滑塊機構
2) 對於擺動導桿機構,由於其導桿的擺角φ 剛好等於其極位夾角θ,因此,只要給定曲柄長度LAB (或給定機架長度LAC)和行程速比係數K就可以由右圖求得機構.