一、機器人的由來
1920年,捷克作家卡雷爾.查培克(Karel Capek)編寫了一部幻想劇:《羅莎姆萬能羅博特公司》(“Rossum’s Universal Robots”)。劇中描寫一家公司發明並製造了一大批能聽命於人,能勞動而且形狀象人的機器,公司驅使這些人造勞動者進行各種日常勞動,甚至取代了世界各國工人的工作,而進一步的研究竟能使這些機器富有感情,於是導致了它們反抗主人的暴亂。劇中的人造勞動者取名為捷克語Robota,意為“苦力”、“勞役”,英語Robot系由此衍生而來。該劇轟動一時,很快譯傳國外。此後,種種“人形機器”見之於各類科學幻想作品。
機器人形象的產生充分說明了人類對於先進生產工具的創造性想象和勇敢追求。人們期待著誕生一種通用、柔軟、靈活的自動機械,它與單能的傳統機器不同,它能模仿人的器官的功能,從事那些只有人才能很好完成的工作。於是,人們這種美好的願望給科學技術的研究提出了一個深入的課題——用工程的方法實現人體所特有的動作機能,以及完成這些動作所必要的智能。
二、機器人技術的進程
機器人從幻想世界真正走向幻想世界是從自動化生產和科學研究的發展需要出發的。
遙控操作器(Teleoperator)和數控機床的出現為機器人的產生準備了技術條件。
二次世界大戰期間,在放射性材料的生產和處理過程中應用了一種簡單的遙控操縱器。操縱人員在一層很厚的混凝土防護牆外通過觀察,用手操縱兩個操縱桿(主動部分),操縱桿與牆內的一對機械抓手(從動部分)通過六個自由度的傳動機構相連,於是機械抓手就能復現人手的動作位置和姿態,代替了操作人員的直接操作。1947年,人們對這種遙控操縱器進行改進,採用電動伺服方式,使從動部分能相對於主動部分作跟隨運動。
1949年,由於生產先進飛機的需要,美國麻省理工學院輻射實驗室(MIT Radiation Laboratory)開始研製數控銑床,把複雜伺服系統的技術與最新發展的數字計算機技術結合起來,1953年研製成功。切削模型以數字形式通過穿孔紙帶輸入機器,然後控制銑床的伺服軸按照模型的軌跡作切削動作。
1954年,美國的George C. Devol設計並製作了世界上第一台機器人實驗裝置,發表了《適用於重複作業的通用性工業機器人》一文,並獲得了專利。Devol巧妙地把遙控操作器的關節型連桿機構與數控機床的伺服軸連接在一起,預定的機械手動作一經編程輸入后,機械手就可以離開人的輔助而獨立運行。這種機器人也可以接受示教而能完成各種簡單任務。示教過程中操作者用手帶動機械手依次通過工作任務的各個位置,這些位置序列記錄在數字存儲器內,任務執行過程中,機器人的各個關節在伺服驅動下再現出那些位置序列。因此,這種機器人的主要技術功能就是“可編程”以及“示教再現”。
60年代,機器人產品正式問世,機器人技術開始形成。
1960年,美國的Consolidated Control公司根據Devol的專利研製出第一台機器人樣機,並成立Unimation公司,定型生產了Unimate(意為“萬能自動”)機器人。同時,美國“機床與鑄造公司”(AMF)設計製造了另一種可編程的機器人Versatran(意為“多才多藝”)。這兩種型號的機器人以“示教再現”的方式在汽車生產線上成功地代替工人進行傳送、焊接、噴漆等作業,它們在工作中表現出來的經濟效益、可靠性、靈活性,使其它發達工業國家為之傾倒。於是Unimate和Versatran作為商品開始在世界市場上銷售,日本、西歐也紛紛從美國引進機器人技術。
在機器人嶄露頭角於工業生產的同時,研究領域不斷地把機器人技術引向深入發展。1961年,美國麻省理工學院Lincoln實驗室把一個配有接觸感測器的遙控操縱器的從動部分與一台計算機連結在一起,這樣形成的機器人可以憑觸覺決定物體的狀態。隨後,用電視攝像頭作為輸入機理的計算機圖像處理、物體辯識的研究工作也陸續取得成果。1968年,美國斯坦福人工智慧實驗室(SAIL)的J.McCarthy等人研究了新穎的課題:研製帶有手、眼、耳的計算機系統。於是,智能機器人的研究形象逐漸豐滿起來。
70年代以來,機器人產業蓬勃興起,機器人技術發展為專門的學科。
1970年,第一次國際工業機器人會議在美國舉行。工業機器人各種卓有成效的實用範例促成了機器人應用領域的進一步擴展,同時,又由於不同應用場合的特點,導致了各種坐標系統、各種結構的機器人相繼出現。而隨後的大規模集成電路技術的飛躍發展及微型計算機的普遍應用,則使機器人的控制性能大幅度地得到提高,成本不斷降低。於是,導致了數百種類的不同結構、不同控制方法、不同用途的機器人終於在80年代以來真正進入了實用化的普及階段。
經過幾十年的發展過程,機器人技術終於形成了一門綜合性學科——機器人學(Robotics)。一般地說,機器人學的研究目標是以智能計算機為基礎的機器人的基本組織和操作,它包括基礎研究和應用研究兩方面內容,研究課題有:(1)機械手設計(2)機器人運動學、動力學和控制(3)軌跡設計與規劃(4)感測器(5)機器人視覺(6)機器人控制語言(7)裝置與系統結構(8)機械智能等。由於機器人學綜合了力學、機械學、電子學、生物學、控制論、計算機、人工智慧、系統工程等多種學科領域的知識,因此,也有人認為機器人學實際上是一個可分為若干學科的學科類。
一、機器人的定義
國際上,關於機器人的定義主要有如下幾種:
(1) 英國牛津字典的定義:“機器人是貌似人的自動機,具有智力的和順從於人的但不具人格的機器”。
(2) 美國機器人協會(RIA)的定義:“機器人是一種用於移動各種材料、零件、工具或專用裝置的,通過可編程序動作來執行種種任務的,並具有編程能力的多功能機械手(manipulator)”。
(3) 日本工業機器人協會(JIRA)的定義:“工業機器人是一種裝備有記憶裝置和末端執行器(end effector)的,能夠轉動並通過自動完成各種移動來代替人類勞動的通用機器”。
(4) 美國國家標準局(NSB)的定義:“機器人是一種能夠進行編程並在自動控制下執行某些操作和移動作業任務的機械裝置”。
(5) 國際標準化組織(ISO)的定義:“機器人是一種自動的、位置可控的、具有編程能力的多功能機械手,這種機械手有幾個軸,能夠藉助於可編程序操作來處理各種材料、零件、工具和專用裝置,以執行各種任務”。
(6) 我國中科院瀋陽自動化研究所的蔣新松院士將機器人定義為:“機器人是一種擬人功能的機械電子裝置(a mechantronic device to imitate some human funtions)”。
上述各種定義有共同之處,即認為機器人(1)像人或人的上肢,並能模仿人的動作(2)具有智力或感覺與識別能力(3)是人造的機器或機械電子裝置。隨著機器人的進化和機器人智能的發展,這些定義都有修改的必要,甚至需要對機器人重新定義。
二、機器人的分類
機器人的分類方法很多。主要有以下幾種分類方法,即按機器人的幾何結構、機器人的控制方式以及機器人的信息輸入方式來分、按機器人的智能程度分、按機器人的用途分等。
1. 按機器人的幾何結構來分
機器人機械手的機械配置形式多種多樣。最常見的結構形式是用其坐標特徵來描述的。這些坐標結構包括笛卡爾坐標結構、柱面坐標結構、極坐標結構、球面坐標結構和關節式球面坐標結構等。
2. 按機器人的控制方式分
按照控制方式可把機器人分為非伺服機器人和伺服控制機器人兩種。
(1) 非伺服機器人(non-servo robots)。
非伺服機器人工作能力比較有限,它們往往涉及那些叫做“終點”、“抓放”或“開關”式機器人,尤其是“有限順序”機器人。這種機器人按照預先編製好的程序順序進行工作,使用終端限位開關、制動器、插銷板和定序器來控制機器人機械手的運動;其工作原理如圖??所示。圖中,插銷板用來預先規定機器人的工作順序,而且往往是可調的。定序器是一種定序開關或步進裝置,它能夠按照預定的正確順序接通驅動裝置的能源。驅動裝置接通能源后,就帶動機器人的手臂、腕部和抓手等裝置運動。當它們運動到由終端限位開關所規定的位置時,限位開關切換工作狀態,給定序器送去一個“工作任務業已完成”的信號,並使終端制動器動作,切斷驅動能源,使機械手停止運動。
(2) 伺服控制機器人(servo-controlled robots)。
伺服控制機器人比非伺服控制機器人有更強的工作能力,因而價格較貴,而且在某些情況下不如簡單的機器人可靠。其工作原理如圖??所示。伺服系統的被控制量(即輸出)可為機器人端部執行裝置(或工具)的位置、速度、加速度和力等。通過反饋感測器取得的反饋信號與來自給定裝置(如給定電位器)的綜合信號,用比較器加以比較后,得到誤差信號,經過放大後用於激發機器人的驅動裝置,進而帶動末端執行裝置以一定規律運動,達到規定的位置或速度等。顯然,這就是一個反饋控制系統。
伺服控制機器人又可分為點位伺服控制和連續路徑(軌跡)伺服控制兩種。
l 點位伺服控制機器人
點位伺服控制機器人能夠在其工作包跡內精確地編入程序的三維點之間的運動。一般只對其端點進行示教,而且機器人以最快的和最直接的路徑從一個端點移到另一個端點。可把這些端點設置在已知移動軸的任何位置上。點與點之間的操作總是有點不平穩,即使同時控制兩根軸,它們的運動軌跡也很難完全一樣。因此,點位伺服控制機器人用於只有終端位置是重要的而對編程點之間的路徑和速度不作主要考慮的場合。
點位伺服控制機器人的初始化程序比較容易設計,但不易在運行期間對編程點進行修正。由於沒有行程控制,所以實際工作路徑可能與示教路徑不同。這種機器人很大的操作靈活性,因而其負載能力和工作範圍均名列前茅。液壓裝置是這種機器人系統最常用的驅動裝置。
l 連續路徑(軌跡)伺服控制機器人
連續路徑(軌跡)伺服控制機器人能夠平滑地跟隨某個規定的路徑,其軌跡往往是某條不在預編程端點停留的曲線路徑。因此這種機器人特別適用於噴漆作業。
連續路徑(軌跡)伺服控制機器人具有良好的控制和運行特性,其數據是依時間採樣的,而不是依預先規定的空間點採樣。這樣,就能夠把大量的空間信息存儲在磁碟或光碟上。這種機器人的運行速度較快,功率較小,負載能力也較小。噴漆、弧焊、拋光和磨削等加工是這種機器人的典型應用場合。
3. 按機器人控制器的信息輸入方式分
採用這種分類法進行分類時,對於不同國家,也略有不同,但它們能夠有統一的標準。這裡主要介紹日本工業機器人協會(JIRA)、美國機器人協會(RIA)和法國工業機器人協會(AFRI)所採用的分類法。
(1) JIRA分類法
日本工業機器人協會把機器人分為六類:
① 手動操作手,是一種由操作人員直接進行操作的具有幾個自由度的加工裝置。
② 定序機器人,是按照預定的順序、條件和位置,逐步地重複執行給定的作業任務的機械手,其預定信息(如工作步驟等)難以修改。
③ 變序機器人,它與第2類一樣,但其工作次序等信息易於修改。
④ 復演式機器人,這種機器人能夠按照記憶裝置存儲的信息來複現原先由人示教的動作。這些動作能夠被自動地重複執行。
⑤ 程序機器人,操作人員並不是對這種機器人進行手動示教,而是向機器人提供運動程序,使它執行給定的任務。其控制方式與數控機床一樣。
⑥ 智能機器人,它能夠採用感測信息來獨立檢測其工作環境或工作條件的變化,並藉助其自我決策能力,成功地進行相應的工作,而不管其執行任務的環境條件發生了什麼變化。
(2) RIA分類法
美國機器人協會把JIRA分類法中的后四種機器當作機器人。
(3) AFRI分類法
法國工業機器人協會把機器人分為四種型號:
① 第1類,手控或遙控加工設備
② 包括第2類和第3類,具有預工作周期的自動設備。
③ 包括第4類和第5類,程序可編和伺服機器人,具有點位或連續路徑軌跡,稱為第一代機器人
④ 第6類,能獲取一定的環境數據,稱為第二代機器人。
4. 按機器人的智能程度分
(1)一般機器人,不具有智能,只具有一般編程能力和操作功能。
(2)智能機器人,具有不同程度的智能,又可分為:
① 感測型機器人
具有利用感測信息(包括視覺、聽覺、觸覺、接近覺、力覺和紅外、超聲及激光等)進行感測信息處理、實現控制與操作的能力。
② 交互型機器人
機器人通過計算機系統與操作員或程序員進行人-機對話,實現對機器人的控制與操作。
③ 自主型機器人
在設計製作之後,機器人無需人的干預,能夠在各種環境下自動完成各項擬人任務。
5. 按機器人的用途分
(1) 工業機器人或產業機器人,應用在工農業生產中,主要應用在製造業部門,進行焊接、噴漆、裝配、搬運、檢驗、農產品加工等作業。
(2) 探索機器人,用於進行太空和海洋探索,也可用於地面和地下探險和探索。
(3) 服務機器人,一種半自主或全自主工作的機器人其所從事的服務工作可使人類生存得更好,使製造業以外的設備工作得更好。
(4) 軍事機器人,用于軍事目的,或進攻性的,或防禦性的。它又可分為空中軍用機器人、海洋軍用機器人和地面軍用機器人,或簡稱為空軍機器人、海軍機器人和陸軍機器人。
6. 按機器人移動性分
(1) 固定式機器人
固定在某個底座上,整台機器人(或機械手)不能移動,只能移動各個關節。
(2) 移動機器人
整個機器人可沿某個方向或任意方向移動。這種機器人又可分為輪式機器人、履帶式機器人和步行機器人,其中後者又有單足、雙足、四足、六足和八足行走機器人之分。
工業機器人是一類根據預先編製在存儲裝置內的操作程序,自動地重複進行作業的機器人,因而也稱為重複型機器人(Repeatable Robot)。
一、系統構成
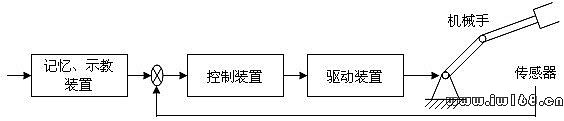
工業機器人的系統構成如圖1-1所示。
工業機器人的本體主要是一隻類似於人的上肢功能的機械手臂,或者是無關節結構,或者是關節式結構。如果要在三維空間對物體進行作業,一般需要六個自由度,即沿笛卡爾坐標三軸的直線移動及繞三個軸的轉動。
工業機器人直接操作對象的是機械手末端的手爪(亦稱End Effector),它隨對象物的形狀和材料不同而製成各種各樣,例如用以夾持工件的無指手掌,用以抓取棒料的有指手爪(一般為二指,有關節或無關節),用以吸附平板的真空吸盤或電磁吸盤,用以弔掛重物的鉤爪等。
早期的工業機器人的示教、記憶、控制裝置利用凸輪、擋塊、插銷板、穿孔紙帶、磁鼓、繼電器等機電元件構成,而80年代的工業機器人則主要使用微處理機系統綜合實現上述裝置的功能。驅動裝置最為普遍的是伺服電機,大型作業的機器人往往使用液壓傳動。較為簡單的或要求防爆的機器人可採用氣動執行機構。
工業機器人的感測器包括外部信息感測器和內部信息感測器。外部信息感測器用以檢測、判斷工作對象的位置、形狀、接觸狀態等,例如從各種原理的接觸開關到完善的視覺、觸覺處理系統。內部信息感測器是指機器人驅動系統中的反饋控制信號檢測元件。
二、控制方式
使用機器人以前,操作人員通過示教裝置把作業內容編成程序,輸入到記憶裝置。從外部發出啟動命令后,機器人從記憶裝置中讀出信息,並送到控制裝置,發出控制信號,由驅動機構控制機械手,(在一定的精度範圍內)按照記憶裝置中的內容完成給定的動作。如果再次啟動,機器人將重複上述作業。
1.控制信息
機器人控制中必須有三種信息。
① 順序信息,即機器人各種單元動作的先後次序,其中包括機器人對外圍設備(如傳送帶、焊接機等)作業條件的檢測、設定等步驟。
② 位置信息,即機器人應達到作業空間各點的坐標值,其中包括手爪在到達點的姿態。
③ 時間信息,即機器人各順序步所用的時間,這也可表示為機器人完成各動作的速度。
控制過程中的示教、存儲和再現都圍繞這三種信息進行。
2.示教、存儲和再現
① 示教是使機器人按照人的要求進行操作,由人把控制信息分離地或集中地輸入到機器人中的過程。示教方法有兩種,一種是直接示教方式,即操作人員直接帶動機器人的手臂依次通過預定的軌跡,這時,順序、位置和時間三種信息可以做到綜合示教。另一種是間接示教方式,即操作人員通過操作手動控制盒上的按鍵,編製機器人的動作順序,確定位置、設定速度或限時。這種方式中三種信息的示教一般是分離進行的。在計算機控制的情況下,用特定的語言編製示教程序,實際上是一種間接示教方式,其中位置信息往往仍需通過手動控制盒設定。
② 存儲是指在必要的期限內保存示教的信息。存儲容量的大小決定機器人完成作業的複雜程度。存儲方式也分為分離存儲和集中存儲兩種。集中存儲控制信息適於存儲量大的複雜作業。分離存儲方式可將三種控制信息單獨存放在不同的裝置里,它要求分離示教,這使示教複雜,但便於再現時靈活組合控制信息。
③ 再現是指根據需要讀出存儲信息,向執行機構發出具體指令。相應於集中存儲方式,再現時只是“原樣照搬”,而對於分離的存儲方式,再現時就可根據外部感測器的輸出信號或通過人工干預改變動作順序,這使機器人對於工作環境的變化具有一定的適應性。
④ 操作是根據再現時所發出的一條條指令,驅使機器人的各個自由度產生相應的動作,最終使機器人手爪從空間一點移動到另一點。

三、PUMA機器人
PUMA(Programmable Universal Manipulator for Assembly)系列機器人是一類先進的計算機控制工業機器人。它是美國Unimation公司的最新產品,後轉產日本、德國等國家。適用於傳送、焊接、裝配、堆放等多種作業,暢銷於世界。圖1-2為PUMA 560 機器人。
以日本川崎重工業公司生產的PUMA 560型機器人為例,機器人的系統構成如圖1-3所示。
機器人本體為一台六自由度關節型電動機械手臂。各關節旋轉範圍分別為:JT1(“腰”),320°;JT2(“肩”),250°;JT3(“肘”),270°;JT4(“腕”1),280°;JT5(“腕”2),200°;JT6(“腕”3),520°。作業空間達0.8m2。負重在動態時為2.5kg,靜態時為6kg。最大速度0.5m/s。重複精度為±0.1mm。機械手腕部可配置兩指(無關節)氣動開閉手爪或其它選件。
PUMA系列機器人的控制器由以集成電路LSI-11為CPU的專用微處理機系統以及各關節的伺服控制電路組成,其中RAM容量為8Kw。PUMA機器人的最大特點是配有一個兼有控制運算與編程語言功能的VAL軟體系統,可用以進行離線或聯機編程,對機械手進行實時控制。
PUMA機器人的示教控制方式有直接與間接兩種方法。使機械臂處於“free”狀態后,各關節自由鬆弛,操作人員可一邊帶動機械手按需要的軌跡移動,一邊按動示教盒上的“Record”按鈕,VAL控制系統自動記錄按動按鈕時機器人手腕的坐標位置,同時,自動編輯運動過程的程序。操作人員也可運用VAL系統的編輯功能間接編製運行程序,經CRT終端鍵入計算機,隨即運行,或存入軟盤,需要時輸入。但程序中的位置變數一般則是另外通過手動控制機械手實際地設定賦值的,示教盒上有相應的按鈕能操縱機器人相對於“Joint”坐標系、“World”坐標系或“Tool”坐標系運動。
VAL系統對於位置控制採用兩種軌跡插補方式。關節插補運動(Joint interpolation motion):根據當前位置點與下一位置點間坐標差值,按照一定的演算法,給每個關節分配應變化的角度。各關節同時轉動,以不同的速度同時到達。機器人手爪端部軌跡為一複雜的曲線。直線插補運動(Straight line motion):實際上是將兩點間的直線軌跡分成很小的間隔,然後再對各個關節的角度變數進行複雜的變換運算。其中必須保證各插補點附近軌跡要平滑,即速度和加速度的連續性。對於複雜曲線的連續軌跡要求,可以設定足夠多的關鍵點,再運用直線插補運動得到實現。對於焊接等作業,VAL系統也有專門的指令調用生成圓弧軌跡的子程序。
操縱型機器人是一類由人操縱進行工作的機器人。
操縱型機器人工作系統實際上是一種人機系統。操縱人員處於聯機控制迴路之中。一方面操縱人員在工作中不停地向機器人發送操作指令,在智能和適應能力方面輔助機器人完成複雜的作業;另一方面,機器人把操作對象和作業環境的狀態直接地或間接地(通過監視裝置)反饋給操縱人員,作為操縱人員控制機器人行為的根據。這樣,人與機器人之間相互傳遞信息的問題就成為操縱型機器人的研究重點。
操縱型機器人的控制方式實際上是用“操縱”代替了工業機器人的“示教”方式。簡單的操縱型機器人的動作可以看作是處於示教階段的直接示教工業機器人的動作。複雜的操縱型機器人具有適應控制方式,即操縱人員只給予“宏指令”,並不指示機器人的動作細節,機器人能根據本身的認識、學習機能自動適應作業情況。這種操縱型機器人接近於智能機器人。
操縱型機器人既具備機器人的一般結構和性能特點,而又不能離開人的操縱,這完全是因為它具有特定的應用需要。
操縱型機器人大體分為以下兩種類型。
1.能力擴大式機器人
這種機器人用於擴大人的體力和活動範圍,或彌補人的肢體功能,例如裝著式機器人和各種人工假肢等。
裝著式機器人也稱“體外骨骼(Exoskeleton)”。這種裝置往往有幾十個關節和相應的電動或液動機構。它們“披掛”或裝定在人體身上,數倍或數十倍地“放大”各個部位的動作力量,代替人從事體力工作,執行機構同時配有力感測器,使操縱者感覺到操作對象的反作用力,調整控制作用。
為傷殘者研製的各種動力假手是典型的操縱型機器人。假手結構是一種關節式機械手臂,自備驅動源,以便按照需要適當增加自由度。大腦皮質運動中樞產生的興奮脈衝傳到截肢端部的肌肉,假手的控制信號就來源於肌肉做機械伸縮的“應變”信號,或者肌肉在興奮脈衝到達時產生的“肌電位”信號。假手裝著者可以用眼睛監視調整假手的動作,而假手也可以配備人工觸覺裝置,向皮膚感覺系統反饋動作過程中受到的刺激。
機器人的手是為了代替人手的工作而研製的。因此,假手和機器人,兩者的最終目標是一致的。而且,假手既然要“以假亂真”,它的運動軌跡、動作姿態就需要自然、美觀、協調。因此,它不但要用到一般機器人的基本技術,而且控制性能方面還有著許多獨特的研究課題。多年來,動力假肢在福利事業的促進下已形成了一個專門的研究方向。
2.遙控機器人
這種機器人一般用於特殊的作業環境,例如:放射性物質、真空、有毒氣體等隔離工作情況;造船、鐵塔、建築等危險工作條件;特別是宇宙、海洋開發用的探查工作環境。
前蘇聯1970年向月球發送了“月球探測器1號”機器人,進行土壤分析、攝影、觀測等任務,如果碰到石頭,可自行拒絕地面人員的挖土命令。美國由“阿波羅12號”向月球發送了“探測者3號”機器人,它在空中實驗室操作人員的控制下伸出約1.5米的機械手,採集月球岩土樣品,在實驗室中進行化驗,把結果發回地球。
用于海洋開發的遙控機器人實際上是安上了機械手、足、眼等器官的深水作業機器。美國建造的“可控水下回收裝置”Curv和“海洋機器人”Mobot,裝有作為視覺用的聲納和攝象機,作為聽覺的水聽器,檢測方向用的陀螺羅盤等。它的機械手通過電纜按照岸上觀測站的指令進行動作,曾在西班牙海域回收了掉入海底的核彈頭。這是一種“無人有纜”的機器人。另外,還有“有人無纜”的情況,操作人員在機器人——深海調查船內操縱多個機械手從事搬運物體和照相攝影等作業。
遙控機器人,特別是遠距離操縱的機器人,由於作業環境的複雜,以及與人的通訊聯繫方面的困難,正在由簡單遙控式、監控式,向智能式的方向發展。
智能機器人是這樣一類機器人:機器人本身能認識工作環境、工作對象及其狀態,它根據人給予的指令和“自身”認識外界的結果來獨立地決定工作方法,利用操作機構和移動機構實現任務目標,並能適應工作環境的變化。
智能機器人即所謂的“第三代機器人”,它與工業機器人是兩種可以同時並存的自動機械,但它的研究目標在於從工程上模擬人(或其它生物體)的複雜動作及其相應的智能行為,並獲得綜合的機器實現。因此智能機器人是工業機器人從無智能發展到有智能、從低智能水平發展到高度智能化的產物。它更接近於人們事先對於“機器人”的理想要求。
智能機器人應該具備四種機能:
l 運動機能——施加於外部環境的相當於人的手、腳的動作機能。
l 感知機能——獲取外部環境信息以便進行自我行動監視的機能。
l 思維機能——求解問題的認識、推理、判斷機能。
l 人機通訊機能——理解指示命令、輸出內部狀態,與人進行信息交換的機能。
由此可見,智能機器人的“智能”特徵就在於它具有與外部世界——對象、環境和人相互協調的工作機能。
從控制方式上看,智能機器人不同於工業機器人的“示教—再現”以及操縱機器人的“操縱”,而是一種“認知—適應”的方式。
一、機器人的硬體系統
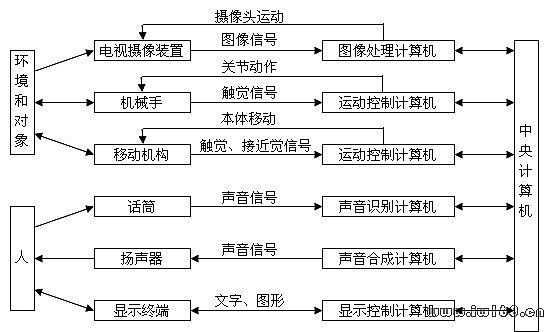
根據研製目的的不同,智能機器人的系統構成不盡一致,比較完整的典型結構如圖1-4所示。
由圖可見,智能機器人的系統綜合運用了多種智能模擬技術,其目標是建立一個“人”的模型。
眼——電視攝像裝置和圖像處理機。“看”和“動”相互關連,是人使用最頻繁的基本動作。機器人的視覺是它最主要的感知手段。視覺裝置可獲取目標物的明暗、距離和顏色三種信息,據以識別它們的形狀、姿態、位置、色別等特徵參數。
手——多關節機械手、多關節機械手指及其控制系統。與工業機器人相比,智能機器人的手一是需要增加自由度,二是需要配備接觸覺、壓覺、滑覺、力覺等感覺以便產生柔軟、靈活、可靠的動作,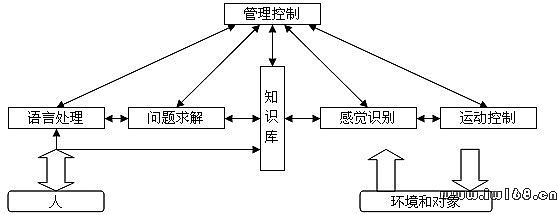
完成複雜作業。而且觸覺信息本身就可用來配合或代替視覺識別物體。
腳——車輪、連桿式、履帶式或爬行式的機構及其控制系統。本體可以自由地“摸索”移動,這是智能機器人與傳統的自動機械的一大區別,這可使它在人難以達到的地方完成作業,還可使它獲得第一性的環境認識信息。
耳和口——話筒和揚聲器以及語音識別和合成系統。兩者用於人機之間的聽覺通訊,能以自然語言與人會話,將使人機聯繫大為通暢,這是機器人的智能水平極高的表現。顯示終端或者用於文字、圖形的視覺通訊,或者用於機器人專用計算機語言的運行。智能機器人專用語言的高級形式接近於人的自然語言,要求具有溝通人與機器人的思維方式的功能,這是目前研究價值最實際的通訊手段。
腦——中央計算機。整個智能機器人的結構是一個多級計算機系統。中央計算機擔負著運動、感知、思維、人機通訊這四種機能所涉及到的信息處理和管理控制任務。它必須:具有大容量內存,以便建立包括環境模型,對象數據、推理機制等內容的知識庫;具有并行實時處理能力,以便改善下屬各子系統之間存在的時間不平衡性,求得協調行為的高速實現。即使如此,理想的智能機器人對於用現有的順序型馮.諾曼計算機作為“腦”仍感不足,而是寄希望於以非順序型理論為基礎的第五代計算機。其原因就在於智能計算機需要一套“第五代”計算機可配備的人工智慧軟體系統。
二、能機器人的軟體系統
智能機器人的軟體系統(如圖1-5所示)實際上就是人工智慧主要技術對於機器人的綜合運用。
機器人問題求解稱之為機器人規劃,即要求機器人自動尋求控制動作的某種有序組合,把初始的作業狀態轉變成滿足一定條件的目標狀態,所求得的動作序列叫做規劃的解。例如把分散放置的零件組裝成某個部件,穿行障礙物到達某個目的地都屬於規劃問題。監督、調整已知規劃的實際執行過程也是機器人規劃系統應有的功能。
自然語音與書面文字都是自然語言處理的對象。語音的識別與合成固然要涉及到信息處理的各種方法,但語言處理的關鍵是對語句(聲音或文字)的語義理解;這需要先對語句的結構進行分析,然後抽取其中的“意義”信息並加以表示,最後做到能對語句作出解釋,回答有關的問題,或者把它們翻譯成其它語言。
視覺與觸覺的識別手段不同,但共同的問題也都在於“理解”,機器人的感覺裝置只是獲取、處理景物的各種特徵信息,(例如,物體的邊緣、形狀等),而最終目標是要建立起景物的“模型”,即把感受數據壓縮為一種容易處理的、明確而有意義的描述(例如,景物中的物體是什麼,處於什麼狀態,相互關係如何等)。
知識庫是智能機器人軟體系統的核心。人工智慧問題中所謂知識,通常是指描述各種客觀環境、對象、條件的,組織成一定結構的“數據”,以及解釋、運用這些“數據”的,反映有關領域客觀規律或主觀判斷過程的推理機制。於是,機器人規劃問題中對於狀態和控制動作的表示,以及尋求規劃的解的搜索與推理過程,自然語言理解問題中建立句法、語義“詞典”及其檢索、推理的過程,感覺識別問題中描述預期的景物模型及其與假設模型的匹配判斷過程等等,都要依賴於知識庫的功能,牽涉到知識獲取、知識表示以及如何使用知識的方法。
機器人的運動控制問題的特點在於機器人具有複雜的機械結構。例如,多關節的機械手需要建立多個坐標系統,進行複雜的坐標變換運算,而處於動態過程中的各個關節還存在著非線性參數、相互耦合等問題,這需要採用近似而有效的軌跡控制方法。對於步行式的機器人移動機構,則需要解決運動穩定性問題,手、腳協調控制問題。
總之,軟體系統是機器人的“生命”,體現了機器人的“智能”,上述問題求解、自然語言處理和感覺識別等技術,都是人工智慧學科中的主要課題。隨著研究的進步,智能機器人軟體系統必將逐步完善、逐步實用。
隨著知識經濟時代的到來,高技術已經成為世界各國爭奪的焦點,機器人技術作為高技術的一個重要分支普遍受到各國政府的重視。一些發達國家不惜投入重金進行機器人研究。目前,日本正在實施人型機器人計劃,該計劃為期5年,分為兩個階段,第一階段1998年-1999年,第二階段2000年-2002年,總投資200億日圓,這也是它的第三個機器人計劃。日本的第一個機器人計劃是1983年啟動的“極限作業機器人”計劃,為期8年,總投資155億日圓,研究開發在核輻射、水下和災害環境下工作的機器人。第二個機器人計劃是1991年啟動的為期10年的“微機械技術”開發計劃,該計劃總投資250億日圓。美國相比較而言更重視軍用機器人的研究,美國國防部最近公布的“無人地面車輛總計劃”從2000財年-2003財年,4年投資1億多美圓。在美國,地面軍用機器人投資與水下機器人、空間機器人和空中機器人相比是最少的。空中機器人也叫無人機,美國國防部自1993年以來花在無人機上的費用已達25億美圓,而且1999-2003財年的5年中還將投入20億美圓用於無人機的研製與採購。美國市場調查表明,未來10年中無人機的銷售將以12.2%的速度增長。1998年的無人機市場為20多億美圓,到2008年將達到70億美圓。我國政府也非常重視機器人的研究,早在七五期間就開始了工業機器人和水下機器人的攻關計劃,並取得了一定的成績。1986年,國家高技術發展計劃(863計劃)將智能機器人列入其中。經過十幾年的艱苦奮鬥,從跟蹤世界先進水平到自主開發,取得了舉世矚目的成果,創造了一批機器人產品和機器人應用工程,為中國機器人技術的進步作出了應有的貢獻。
世界各國都非常重視機器人技術的開發與研究,主要有以下幾個方面的原因。
機器人技術是集光機電信息自動化於一身的高新技術,從某種意義上講,一個國家機器人技術水平的高低,代表了一個國家製造業的水平和綜合實力。也就是說,一個落後的國家不可能研製出先進的機器人系統。
l 發展工業機器人可以增強一個國家的製造能力
製造業是一個國家國民經濟的支柱產業,據有關資料報道,在一些工業發達的國家和新興工業化的國家,製造業的生產總值佔國內生產總值的20%~55%。當今,世界市場已生成了以製成品為主(占80%以上)的結構,這說明製造業不論是在發達國家,還是在發展中國家,在國民經濟中均佔有主要地位。世界上各個國家經濟的競爭主要是製造技術的競爭,在各個國家的企業生產力構成中,製造技術的作用一般占60%左右。由此可見,製造技術水平的高低已經成為衡量一個國家國民經濟實力和科技發展水平的重要標誌之一。工業發達國家普遍認為,現代科學研究的重點應轉移到製造技術上來,在未來競爭中,誰掌握了先進位造技術,誰就掌握了市場。從某種意義上講,製造技術,特別是先進位造技術已成為一個國家命運的主宰。工業機器人是柔性製造的核心,是現代製造不可缺少的設備之一。為了提高產品的生產率提高產品的質量和產品質量的一致性,很多企業都是通過使用工業機器人來實現這一目的。我國的製造加工能力相對較差,一些傳統的製造企業受到市場的巨大衝擊。這些企業大都是使用剛性設備,要想改產就必須重新購買新的設備,而企業又沒有足夠的資金購買新的生產線,老產品失去市場,新產品又造不出來,致使有些企業舉步維艱。
國外一些大的汽車、電子、機械製造商無不採用了工業機器人作為關鍵生產設備。他們可以根據市場需求,及時調整生產策略,以小批量、多品種,佔領更多的市場份額。我國的一些企業也已經嘗到了使用機器人的甜頭,工業機器人正在得到更多的認可。國家863計劃智能機器人主題正是看到了這一趨勢,及時調整了發展重點,對工業機器人及其應用示範工程給予了大力支持,並取得了明顯的效果,在摩托車、汽車、電子、家電等行業推廣了一批示範工程,並形成了擁有自主知識產權的產品系列。
l 發展特種機器人可以增強國家的可持續發展能力
所謂的特種機器人是指除工業機器人之外的各種機器人。在國家863計劃實施的初期,我們研究的重點就是各種用途的特種機器人,並先後研製出了300米、1000米、6000米水下機器人、混凝土噴射機器人、排險機器人、核工業機器人、機器人壓路機、機器人推土機、鑿岩機、農林業機器人、微操作機器人、爬壁機器人、管內作業機器人、雙足步行機器人、靈巧手等,大大縮短了我國機器人水平與發達國家之間的差距,有力地推動了我國機器人技術的發展,加強了機器人與社會、經濟的聯繫。
智能機器人是具有感知、思維和行動功能的機器,是機構學、自動控制、計算機、人工智慧、光電技術、感測技術、通訊技術、模擬技術等多多種學科和技術的綜合成果。智能機器人作為新一代生產和服務工具,在製造領域和非製造領域佔有更廣泛、更重要的位置,這對人類開闢新的產業,提高生產和生活水平具有十分現實的意義。
海洋中有豐富的礦產資源,早在60年代一些國家就將目光投向了公海。“聯大”通過決議:國家管轄以外的海域為人類共同擁有。為了使我國在國際海底區域佔有一席之地,1991年中國礦產資源研究開發協會在聯合國登記註冊,就此中國成為國際海底開發先驅投資者。聯合國海底公約規定給先驅投資者一定面積的海域,讓他們進行勘探,將他們認為貧瘠或難以開採的部分放棄,對留下的一部分擁有優先開採權。
聯合國給了我國30萬平方公里的海域,通過多次探測,最後我國將對其中7.5萬平方公里較為富饒和易於開採的海域擁有優先開採權。在海洋勘探過程中,由國家863計劃研製的6000米水下無纜自治機器人系統,先後兩次出海,獲得了海底錳結核分佈的珍貴資料,使得我國成為世界上少數幾個具有深海探測能力的國家之一。
機器人技術的發展依賴於其相關的基礎研究和關鍵技術的進展;同時機器人技術的應用又帶動了相關學科和技術的研究水平。總之,面向先進位造的工業機器人和面向非製造業的特種機器人的研究、開發、應用將成為21世紀機器人的兩個重要發展方向。
早在二次世界大戰期間,德國人就研製並使用了掃雷及反坦克用的遙控爆破機器人,美國則研製出遙控飛行機器人,這些都是原始的機器人武器。隨著計算機技術、人工智慧技術的發展,以美國為首的一些發達國家,看到了機器人技術對未來戰爭的影響,十分重視研究開發先進的軍用機器人系統。
有人說未來的戰爭將是無人戰爭,而在戰爭中的主角將是勇猛無敵的機器人士兵。在電影和電視中我們已看到了機器人戰爭的場面,但這似乎離我們的現實生活還太遙遠。儘管現在機器人技術還沒有達到人們想象的那樣先進,但對現代戰爭和社會安全已經產生了巨大的影響。在海灣戰爭、波黑戰爭、科索沃戰爭中,都使用了各種各樣的無人機和地面軍用機器人,這些機器人系統在戰場偵察、探雷排雷、監視、通訊中繼、電子對抗、火力導引、戰果評估、騷擾、攻擊等方面起了特殊的作用。
美國是一個軍事大國,他們在軍用機器人技術方面處於世界領先水平。世界上幾乎所有大的軍事行動都有美國人參加,他們通過使用機器人,有效地減少了戰場上士兵的傷亡。軍用機器人可分為地面、空中、水下機器人,其中的智能機器人具有感覺、知覺、識別、判斷能力,甚至可以有思維、推理決策功能。當前的研究主要在製造少量裝用高技術系統方面,它們在完成任務時與其它地面、空中及水下感測器及執行機構保持聯繫,從而提高作戰質量。
從機器人的現狀來看,世界上機器人每年的銷售額只有幾十億美圓,在我國整個機器人領域的產值每年也就幾億人民幣,似乎微不足道。從世界範圍來看,這主要是因為現在相對比較成熟的只有工業機器人,服務機器人、個人機器人的技術和市場還處於萌芽期,沒有形成氣候。從國內形式看,主要是因為我們國家經濟還欠發達,很多企業還不了解機器人能幹什麼,不了解使用機器人有什麼好處。
從世界機器人的發展趨勢看,服務機器人、個人機器人具有巨大的市場潛力,可以預見,十年或更長一點時間之後,個人機器人就會像個人電腦一樣走進千家萬戶,成為人類社會必不可少的生活用品。機器人不僅可以幫助你完成家務、照顧老人、防火防盜,還可以和你聊天,休閑娛樂,成為你知心的朋友。
在國家攻關計劃和863計劃的支持下,我們已經研製出了各種用途的機器人,在國際上引起了很大反響,受到了國際社會的關注。由日美英法等國發起的國際先進機器人計劃以前只有幾個發達國家參加,後來我國參加了協調會,並介紹了我們的科研成果,產生了良好的影響,並以觀察員身份成為該組織的成員,第二年成為正式會員,提高了中國科技的國際地位。
目前,我國機器人市場還不是很大,其原因是多方面的。機器人在一個國家發展的快慢不是一個簡單的經濟問題,其中包括了很多哲學、倫理等多方面的因素。我國是一個人口大國,由於人們的總體科技文化素質還不很高,缺乏對機器人的了解。很多人認為,現在下崗人員很多,還用機器人幹什麼。這是一個偏頗的觀點。其實機器人不是簡單地代替人工作,我們使用機器人是讓它們完成不適宜人直接干、幹不了和干不好的一些工作。比如機器人機器人可以進入病人體內進行檢查和治療,機器人可以進入煤氣管道進行檢查和維修,機器人可以進入核電站檢查核泄漏,機器人可以登陸月球,可以深潛海底,機器人可以24小時不停地重複單調或複雜的工作,而且質量優良,所有這些都是人所不及的。從現在的情況看,在最近1-2年內,我國機器人不會有大的增長,不是不需要,而是不知用或用不起,這需要一個科普和認識過程。我國加入WTO後會使一些企業清醒。從另一個角度將,也正是由於我國企業裝備的落後和生產力水平低下,才造成了產品的更新換代遲緩和企業的應變能力弱。站在國家的角度來看,我們必須發展具有自主知識產權的機器人技術,才能在國際競爭中取得主動權。
我國是一個發展中的大國,改革開放、開拓創新是我們發展科技與經濟的基本方針,我們必須學習、跟蹤、借鑒世界上先進的東西,但是很多高技術必須由我們自己開發,尤其是國防高技術。我們是一個大國,我們不能指望由別人來保衛我們的安全。霸權主義不希望我們在機器人技術方面有大的發展,不希望我們的機器人技術趕超世界先進水平,所以我們只能以自力更生為主,使中華民族屹立於世界之林,起到一個大國應有的作用。
在我國有上千萬人工作在有毒、有害、高溫、危險的作業環境中,為了人類的健康和社會文明,我們需要發展機器人,將他們從惡劣環境中解放出來。
新世紀的年輕一代建設者大多數都是獨生子女,儘管我們人口很多,但有些工種(如採煤、鑄造、噴漆等)將出現人員短缺的現象。用機器人完成這些工作勢在必然。另外,由於我國目前人口結構、社會醫療條件的不斷改善,我國也將步入老齡化社會,而且隨著物質及精神生活水平的提高,人們將需要更多的智能化、社會化、家庭化、個性化、感情化的服務,機器人將大顯神通。
現代市場是一個開放的市場,是一個無國界的市場。我們的產品要直接和一些發達國家的大公司競爭,如果沒有可靠的質量,沒有優質服務,我們能在競爭中站住腳嗎?機器人的應用,不僅可以提高產品的質量,提高產品的該型速度,適應快速變化的市場,滿足消費者的需要,而且可以降低產品的成本,提高市場競爭能力。
我國是一個發展中的大國,國民經濟每年都以較高的增長率遞增,這也為機器人的應用提供了機遇。隨著中國加入WTO,很多企業面臨巨大的壓力,因為他們必須與一些老牌的世界知名企業站在同一起跑線上,競爭將更加白熱化。如何應對這難得的機遇、嚴峻的挑戰,成為每一個企業家必須回答的問題。為了搶佔市場份額,必須實現規模化經營,增強應變能力,提高自己的裝備水平和管理水平。機器人將在其中發揮不可替代的作用。隨著我國大中型國有企業的改制、重組、調整,將出現一批新興產業,也將誘發新一輪的投資,工業機器人作為先進位造業的核心裝備必將大有用武之地。
這兩年,我國在擴大內需,擴大基礎設施建設方面有較大動作,黨中央、國務院提出的西部大開發戰略正在進行之中,這也為我國的機器人提出了新的課題。機器人主題已研製和正在研製的混凝土噴射機器人、鑿岩機器人、機器人壓路機、機器人推土機等將各顯神通。21世紀是人類走向海洋,向海洋要資源的世紀,我們的系列水下機器人將在海洋資源勘探與開發、沉船打撈等諸多方面發揮其特殊的作用。
台灣問題、領海問題一直是非常敏感的問題,要想解決好這些問題,必須有先進的水上、水下裝備,發展先進的水下機器人可以有效地提高我國的領海保衛能力,提高我國的國防實力。
通過863計劃的實施,我國機器人產業化已初露端倪,而且發展勢頭良好。一些企業已看到了機器人的巨大潛力,一汽、華錄、徐工、海爾、嘉陵等大型集團都開始涉足機器人領域。國外各大機器人公司也紛紛進入中國市場,他們都看到了中國潛在的機器人市場。在這種情況下我們能不加速發展我們的機器人嗎?
抓住時機,迎接挑戰,加速我國機器人產業化的發展迫在眉睫,我們必須採取相應的措施,才能適應形勢。
隨著我國製造業的快速發展,國內對機器人自動化裝備的需求越來越旺,國外大的機器人公司紛紛進入中國市場,我們的產業化基地在中小型的工程中有較強的競爭力,而對大型的工程,缺乏足夠的資金實力和企業間的協調能力,只有成立大規模的集團公司,才有能力與國際大公司抗衡。
我們的特種機器人總的來說性能價格比優於國外公司,但我們的小企業很難單獨打入國際市場,只有成立了一定規模的公司,才易於開展國際上的業務。
目前我們的企業開發生產的產品比較單一、批量小,元器件不配套,很難形成規模,增大投入和產出形成規模進而在統一的旗幟下形成品牌,對降低產品的成本,提高質量和促進市場營銷都能帶來極大的好處,企業有望以較快的速度形成良性循環,穩步快速發展。我國的市場經濟還處在初級階段,許多行業的競爭還處在無序的狀態,我們現有的產業化基地對國內的相關行業有競爭優勢,而內部協作協調能力較弱,不益於發揮各自的資源優勢,成立集團有益於競爭的有序化。
機器人是具有創新性的、戰略性的、對國民經濟和國家安全有巨大影響的高技術。機器人作為21世紀經濟技術制高點,普遍得到了各國政府的高度重視,投入了巨額資金,這也說明了機器人技術的重要性和對未來的影響。最近美國開始對機器人技術進行封鎖,所以國家應該繼續投入資金加快機器人基礎學科和關鍵技術的研究,推動機器人產業的發展。
在工業機器人產業化的初期,為了支持國產機器人的發展,對規模化生產的企業可按其實際銷售的工業機器人產品,參照國際市場的情況,給予一定的優惠政策。
從日本推廣應用的經驗看,對使用機器人的企業實行減免稅政策,有利於機器人產業化的發展。國家應該通過研討出台相應的措施,鼓勵使用機器人。
現在我們國家擁有機器人協會、學會不少,這些都是二級學會,各個分會針對的重點不同,涉及的人員範圍也不同,相互溝通也不夠,給人一種各行其事的感覺。如果能成立一個中國機器人協會,情況會大有改觀。中國機器人協會要把現有的機器人二級學會都召集在一起,以發展中國機器人為己任,推動機器人科學技術研究和產業化的水平。機器人協會主要有以下幾個方面的責任:
l 組織學術交流,及時了解國際國內的機器人科學技術新動向,在國內形成一種強烈的學術氛圍,提高我國的研究水平;
l 對中國的機器人市場進行調查分析,提出有關的建議和意見,促進機器人市場的發展;
l 組織科普宣傳活動,讓更多的人了解機器人技術,培養後備科技人才,提高國民整體科技素質。
要想使更多的人了解使用機器人,必須拿出一定資金,搞各種各樣的機器人科普宣傳活動,如出版科普圖書,製作科普電視節目,舉辦一些青少年喜歡參加的活動等,讓人們了解機器人能夠幹什麼,用機器人有什麼好處,機器人對未來生活的影響等。進行機器人科普宣傳不僅符合“科教興國”的方針,而且對機器人產業化大有裨益。21世紀是更加開放和輝煌的世紀,中國機器人及其產業化任重道遠。