一、普通制動器的問題
忽略車輪及與其一起旋轉部件的慣性力矩和車輪的滾動阻力,汽車制動時車輪的受力情況見圖1-1.
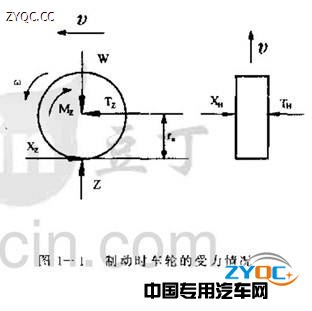
圖中:W-車輪承受的徑向載荷;Z-地面對車輪的法向反力;Mz-制動器產生的制動力矩;Tz-車軸對車輪的縱向推力;Xz-地面對車輪的切相反作用力;r0-車輪的工作半徑;TH-車軸對車輪的橫向反作用力;v-汽車行駛方向;w-車輪制動方向。
制動時,地面對車輪的切向反力Xz使車輪減速度,因此,Xz為地面制動力;地面對車輪的橫向反力XH可阻止車輪在TH力的作用下側向滑移,因此,XH為地面防側滑力。
地面制動力是在制動器的制動力矩作用下產生的,在車輪沒有拖滑時,地面制動力主要取決於制動器制動力矩的大小(Xz=M/r0),在這種情況下,制動踏板的壓力增大,制動器產生的制動力矩相應增大,地面制動力也就增大,汽車的減速度增加。但是,地面制動力受地面附著力的限制,最大地面制動力Xmax為:

式中:Φz——地面縱向附著係數。
由上式可知,在緊急制動情況下,地面縱向附著係數對制動效果有著直接的影響。
最大地面防側滑力Xmax為:

式中:ΦH——地面橫向附著係數。
由上式可知,地面橫向附著係數的大小對防止車輛側滑、甩尾起著決定性的作用。
2.滑移率與制動效果
滑移率s的定義如下:
式中:v——車輛相對地面的移動速度;
r0——車輪的工作半徑;
w——車輪的角速度;
車輪被完全抱死時:
w=0
s=100
車輪作純滾動時:
r0w=v
s=0
某種路面的地面附著係數與滑移率之間的關係見圖1-2.
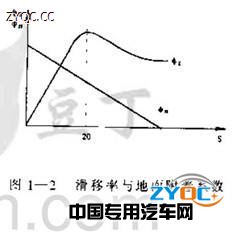
從這有代表性的地面附著係數變化特性中可知,車輪滑移率在20左右時,縱向附著係數最大,橫向附著係數也不小,在緊急制動時,如果能適當地控制制動器制動力的大小,使車輪處於邊滾邊滑(s=20)的狀態,可使地面制動力達到最大,縮短制動距離;同時,可保持良好的防側滑能力。
3.普通制動器的問題
普通制動器在緊急制動時由於制動器的制動力過大而將車輪抱死,帶來了如下的問題:
(1)由於縱向附著係數不是最大,降低了地面制動力而使制動距離延長了。
(2)由於橫向附著係數為零,地面對車輪無防側滑能力,因此,緊急制動時易出現車輛側滑和甩尾。
(3)輪胎與地面的劇烈摩擦,使輪胎的磨損加劇。
二、ABS的發展概況
1.制動防抱死系統的作用
制動防抱死系統簡稱ABS,是英文「Anti-lock brake system」的縮寫。ABS的作用就是在汽車制動時。自動控制制動器制動力的大小,使車輪不被抱死,處於邊滾邊滑(滑移率在20左右)的狀態,以保證車輪與地面的附著力在最大值。因此,ABS相比於普通制動系統有如下優點:
(1)充分發揮制動器的效能,縮短制動時間和距離。
(2)可有效防止緊急制動時車輛側滑和甩尾,具有良好的行駛穩定性。
(3)可在緊急制動時轉向,具有良好的轉向操縱性。
(4)可避免輪胎與地面的劇烈摩擦,減少了輪胎的磨損。
2.制動防抱死系統的發展過程
ABS最初的應用始於飛機,40年代末,ABS在波音47飛機上應用,以後,ABS成為飛機上的標準件,但這種採用真空管的ABS在汽車上應用其性能達不到要求,價值其體積大、成本高等,因此,在汽車上的實用價值不大。1971年,德國波許公司首次推出了電子ABS,並從開始的集成電路,發展為用微機控制。從此,ABS在汽車上的應用得以迅速的發展。現在,ABS已成為汽車上的標準件,其控制形成也從二輪防抱死控制發展為四輪防抱死控制。1987年,波許公司又推出了汽車驅動防滑轉系統(Anti-Slip Regulation 簡稱ASR),ASR是ABS的完善和補充,它可防止汽車起步、加速、在滑溜路面行駛時車輪滑轉,以提高汽車的牽引性和操縱穩定性。目前,集ABS和ASR功能為一體的防滑控制系統已在一些汽車上使用。
三、ABS的基本組成和原理
1.制動防抱死系統的基本組成
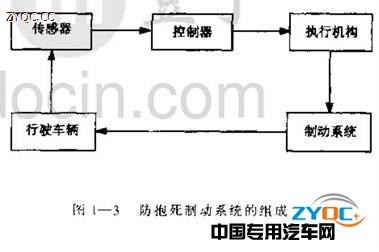
制動防抱死系統由防止車輪抱死的電子控制系統和普通的制動系統組成,見圖1-3.現在我們在說ABS時,通常是單指防抱死電子控制系統。防抱死電子控制系統由感測器、控制器和執行機構組成。
2.制動防抱死系統的基本原理
防抱死電子控制系統的核心是由微電腦組成的控制器。它通過感測器監視汽車制動時車輪是否抱死。在一般的制動情況下,司機踩在制動踏板上的力較小,車輪不會被抱死。控制器無控制信號輸出,這時,就如同普通的制動系統,制動力完全由司機踩在制動踏板上的力來控制。在緊急制動或是在松滑路面行駛時制動,車輪被抱死的情況下,控制器就會輸出控制信號,通過執行機構(即制動壓力調節器)控制制動器的制動力,使車輪不被抱死。
四、ABS的分類
目前,汽車上使用的ABS有不同的結構形式,下面以不同的分類方式加以概括。
(一)按控制器所依據的控制的參數不同分類
1.以車輪滑移率S為控制參數的ABS
控制器根據車速和車輪轉速感測器的信號計算車輪的滑移率,作為控制制動力的依據。當計算得到的滑移率S超出設定值,控制器就輸出減小制動力信號,通過制動壓力調節器減小制動壓力,使車輪不被完全抱死;當滑移率S低於設定值時,控制器輸出增大制動力信號,制動壓力調節器又使制動壓力增大。通過這樣不斷地調整制動壓力,控制車輪的滑移率在設定的最佳範圍。
這種直接以滑移率為控制參數的ABS需要得到準確的車身相對地面的移動速度信號和車輪的轉速信號,車輪轉速信號容易得到,但取得車身移動速度信號則較難。已有用多普勒(Doppler)雷達測量車速的ABS,但到目前為止,此類ABS應用還很少見。
2.以車輪角速度為控制參數的ABS
控制器根據車輪轉速感測器的信號計算車輪的角加速度,作為控制制動力的依據。計算機中事先設定了兩個門限值:一個是角減速度門限值,作為車輪被抱死標誌;一個是角加速度門限值,作為制動力過小,車輪轉速過高標誌。制動時,當車輪角減速度達到門限值時,控制器輸出減小制動力信號;當車輪轉速升高至角加速度門限值時,控制器則輸出增加制動力信號。如此不斷地調整制動壓力,使車輪不被抱死,處於邊滾邊滑的狀態。
目前汽車上使用的ABS基本上都是此種形式。
(二)按制動壓力調節器的結構不同分類
1.機械柱塞式ABS。
2.電磁閥式ABS。
目前,ABS採用電磁閥式制動壓力調節器的較為多見。
(三)按功能和布置的形式不同分類
1.後輪防抱死ABS。
2.四輪防抱死ABS。
現代汽車,後輪防抱死ABS已很少應用,基本上都採用四輪防抱死制動系統。
(四)按主要生產廠家分類
1.德國的波許(BOSCH)ABS、戴維斯(Teves)ABS。
這是目前歐、美、日、韓等國汽車採用最多的ABS。
2.美國的邦迪克斯(Bendix)ABS。
3.美國的達科(Delco)ABS。
4.日本的OEM ABS。