凸輪機構中,從動件的運動規律與凸輪輪廓曲線存在著對應關係。要進行凸輪設計,首先需根據工作要求和使用場合,選擇從動件運動規律。從動件遠離凸輪迴轉中心的這一行程稱推程,對應的凸輪轉角稱為運動角 ;從動件靠近凸輪迴轉中心的這一行程稱回程,對應的凸輪轉角稱為回程運動角
;從動件靠近凸輪迴轉中心的這一行程稱回程,對應的凸輪轉角稱為回程運動角 ;對應於從動件在離凸輪迴轉中心最遠處停止不動時間凸輪的轉角稱為遠休止角
;對應於從動件在離凸輪迴轉中心最遠處停止不動時間凸輪的轉角稱為遠休止角 ;對應於從動件在離凸輪迴轉中心最近處停止不動時間凸輪的轉角稱為近休止角
;對應於從動件在離凸輪迴轉中心最近處停止不動時間凸輪的轉角稱為近休止角 ;從動件的最大行程稱為升程h。常用的從動件運動規律包括:
;從動件的最大行程稱為升程h。常用的從動件運動規律包括: 等速運動規律:該運動規律的速度曲線不連續,從動件在運動起始和終止位置速度有突變,理論上加速度在此時變為無窮大,從動件產生無窮大的慣性力。實際上由於材料具有彈性,加速度和慣性力都不會無窮大,但仍會使機構產生剛性衝擊。
等加速等減速運動規律:其速度曲線連續,加速度在起始、中間、終止位置有突變,引起慣性力的突然變化,導致柔性衝擊。
簡諧運動規律:速度曲線連續,加速度在起始、終止位置有突變,引起柔性衝擊。
擺線運動規律:速度加速度均連續變化,無衝擊。
3-4-5次多項式運動規律:速度加速度均連續變化,無衝擊。
此處,僅給出計算等速運動規律的位移、速度、加速度公式,其他運動規律的計算方法見文獻【10】。
推程:
 (2-1)
(2-1) (2-2)
(2-2) (2-3)
(2-3)回程:
 (2-4)
(2-4) (2-5)
(2-5) (2-6) 式中 表示由推程起始點算起凸輪的轉角。在實際工作中,應根據不同的工作情況選擇從動件不同的運動規律,為了獲得更好的運動和動力特性,還可以把幾種常用的運動規律組合起來使用,這種組合稱運動曲線的拼接。本文軟體中提供了以上五種運動規律曲線。
表示由推程起始點算起凸輪的轉角。在實際工作中,應根據不同的工作情況選擇從動件不同的運動規律,為了獲得更好的運動和動力特性,還可以把幾種常用的運動規律組合起來使用,這種組合稱運動曲線的拼接。本文軟體中提供了以上五種運動規律曲線。 2.1.1 凸輪校驗
2.1.1.1 壓力角
凸輪廓線決定從動件的運動,設計不好,將使從動件不能準確、有效地實現預期的運動規律。凸輪檢驗的指標是壓力角和實際廓線的曲率半徑[10]。
壓力角表示凸輪實際廓線上某點與從動件接觸時,在不計摩擦的前提下,凸輪廓線在該點上的法線方向與從動件速度方向所夾的銳角。壓力角是衡量凸輪傳力特性好壞的重要參數。凸輪對從動件的作用力可分解成沿從動件運動方向的有效分力和垂直於從動件運動方向的無效分力,壓力角越大,無效分力越大,導致的摩擦力越大,機構工作效率越低,當壓力角達到某個數值時,將會使機構產生自鎖。為了使機構順利工作,規定了壓力角的許用值 ,許用值的數值隨著凸輪機構的類型和行程段的變化而變化。
,許用值的數值隨著凸輪機構的類型和行程段的變化而變化。 為減小壓力角,應增大凸輪的最小向徑——基圓半徑,但一味增加基圓半徑又會使機構龐大。機構的尺寸特性和傳力特性相互制約,應兩者兼顧,在滿足壓力角條件 的前提下,基圓半徑取較小值。
的前提下,基圓半徑取較小值。 2.1.1.2 曲率半徑
直觀的看,滾子從動件盤形凸輪機構理論廓線是滾子中心在凸輪這一運動平面上的軌跡,以凸輪理論廓線上各點為圓心作一系列滾子圓,該圓族的包絡線即凸輪實際廓線。平底從動件盤形凸輪機構理論廓線是平底中心在凸輪這一運動平面上的軌跡,以凸輪理論廓線上各點為中心作一系列平底,該平底族的包絡線即凸輪實際廓線。
對於滾子從動件凸輪機構,內凹的凸輪理論廓線總可以得到實際廓線,實際廓線的曲率半徑 等於理論廓線曲率半徑
等於理論廓線曲率半徑 與滾子半徑
與滾子半徑 之和,即
之和,即 ,在設計時,通常是先根據結構和強度條件選擇,再校核,曲率半徑應不小於某一規定值
,在設計時,通常是先根據結構和強度條件選擇,再校核,曲率半徑應不小於某一規定值 ,即
,即 。
。 若滾子從動件凸輪機構的凸輪理論廓線的外凸,其實際廓線的曲率半徑 ,若
,若 ,則
,則 ,實際廓線將出現尖點,極易被磨損,不能付之實用;若
,實際廓線將出現尖點,極易被磨損,不能付之實用;若 ,則
,則 ,實際廓線將出現交叉,加工時,交點以外的部分將被刀具割去,導致從動件運動失真,無法準確 實現預期的運動規律。
,實際廓線將出現交叉,加工時,交點以外的部分將被刀具割去,導致從動件運動失真,無法準確 實現預期的運動規律。 對於平底從動件盤形凸輪機構,只要保證凸輪實際廓線各點處的曲率半徑均大於零,則可使凸輪廓線全部外凸,避免廓線變尖或出現交叉。為防止接觸應力過高和減少磨損,應有 。
。
2.2 用高副低代方法設計平面凸輪的基本原理
據高副低代理論,平面機構中的高副可用含有2個低副的虛擬構件代替,低副中心位於運動副元素的曲率中心處,代換前後,機構自由度及瞬時運動不變。將凸輪與從動件瞬時接觸點M處的高副用帶2個低副的桿件代替,代換后,平面連桿機構主、從動件的瞬時運動特性分別和凸輪及凸輪從動件完全一致,該瞬時平面連桿機構的壓力角即凸輪機構的壓力角。
對於滾子從動件盤形凸輪機構和移動凸輪機構,虛擬桿為帶兩個轉動副的連桿AB,轉動副的中心分別位於凸輪廓線上點M處的曲率中心A和滾子中心B處,點A到點B間的長度lAB即凸輪理論廓線上點B處曲率半徑,點A、M間長度 即凸輪實際廓線上點M處曲率半徑
即凸輪實際廓線上點M處曲率半徑 。
。 對於平底從動件盤形凸輪機構,虛擬桿為帶一轉動副的滑塊,轉動副的中心位於凸輪廓線上點M處的曲率中心A處,導路垂直於點M的運動方向。
對代換后的平面連桿機構建立位移、速度、加速度的矢量方程式,可求得虛擬連桿長和方向,進而得出凸輪廓線方程、曲率半徑和壓力角表達式。
2.3 盤形凸輪的設計
盤形凸輪是最常用的凸輪,設計時,首先初步擬定凸輪輪廓基圓半徑 、滾子半徑
、滾子半徑 、許用壓力角
、許用壓力角 和許用曲率半徑
和許用曲率半徑 以及必須的尺寸參數,再根據機構工作要求選定凸輪轉速
以及必須的尺寸參數,再根據機構工作要求選定凸輪轉速 、從動件運動規律和升程h、推程運動角、回程運動角
、從動件運動規律和升程h、推程運動角、回程運動角 、遠休止角、近休止角
、遠休止角、近休止角 。
。 據設計的從動件運動規律,求取直動從動件位移 、速度
、速度 、加速度
、加速度 或擺動從動件角位移
或擺動從動件角位移 、角速度
、角速度 、角加速度
、角加速度 ,再據此分析代換機構中虛擬桿的桿長和方向,求取凸輪實際廓線坐標,並檢驗壓力角
,再據此分析代換機構中虛擬桿的桿長和方向,求取凸輪實際廓線坐標,並檢驗壓力角 和實際曲率半徑
和實際曲率半徑 ,若不滿足,調整相應的參數。
,若不滿足,調整相應的參數。 考慮到圓向量函數[8]直觀性強,可避免公式推導中不必要的展開,採用圓向量函數表達矢量,矢量用單位向量 或
或 與模的乘積表示,表示與x軸之間有向角為
與模的乘積表示,表示與x軸之間有向角為 的單位向量,表示與x軸之間有向角為
的單位向量,表示與x軸之間有向角為 的單位向量,自x軸正向度量,逆時針為正,順時針度量為負。圓向量的計演算法則詳見附錄I。
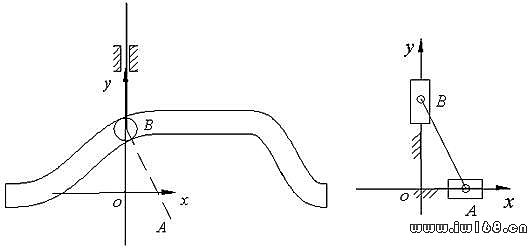
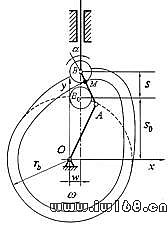
的單位向量,自x軸正向度量,逆時針為正,順時針度量為負。圓向量的計演算法則詳見附錄I。 以凸輪迴轉中心O為原點建立直角坐標系Oxy,x、y軸單位向量分別為i、j。圖2.1中用粗實線表示凸輪轉過任意角時,高副低代所得平面連桿機構。機構中各構件的轉角、角速度、角加速度逆時針取正、順時針取負。 2.3.1 滾子直動從動件盤形凸輪機構中的凸輪設計
偏置滾子直動從動件盤型凸輪機構,從動件導路偏距為w(
導路在x軸左側w為正,反之為負),升程h,從動滾子中心初始位置處於B0點,當凸輪轉過角后,如圖2.1所示,從動滾子中心處於B點。 凸輪機構高副低代后得到曲柄滑塊機構OAB,滑塊上B點位移、速度、加速度矢量方程分別為
 (2-7)
(2-7)式中
圖2.1滾子直動從動件盤形凸輪機構的高副低代
 (2-8)
(2-8) (2-9)
(2-9)由式(2-7)(2-8)(2-9)得:
 (2-10)
(2-10) (2-11)
(2-11)AB桿的方向亦即從動件受力方向,從動件運動沿y軸方向,凸輪機構壓力角為
 (2-12)
(2-12)
點M處曲率半徑為 即
即  (2-13)
(2-13)從動滾子與凸輪輪廓接觸點M的向徑為 ,將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑:
,將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑:  (2-14)
(2-14)
式(2-14)分別點乘 ,得凸輪實際廓線的直角坐標方程
,得凸輪實際廓線的直角坐標方程  (2-15)
(2-15)機床加工凸輪時,常採用銑刀、砂輪等圓形刀具。給定刀具半徑 ,刀具與凸輪廓點M接觸時,刀具中心Q必在代換機構的虛擬連桿方向,與點M相距。用代換式(2-15)中的,得圓形刀具中心軌跡曲線直角坐標方程
,刀具與凸輪廓點M接觸時,刀具中心Q必在代換機構的虛擬連桿方向,與點M相距。用代換式(2-15)中的,得圓形刀具中心軌跡曲線直角坐標方程  (2-16)
(2-16) 取 時,式(2-15)即對心式直動從動件盤形凸輪機構凸輪廓線直角坐標方程;取
時,式(2-15)即對心式直動從動件盤形凸輪機構凸輪廓線直角坐標方程;取 時,式(2-15)即尖底直動從動件盤形凸輪機構的實際凸輪廓線方程,亦可看作滾子直動從動件盤形凸輪機構的理論凸輪廓線方程。
時,式(2-15)即尖底直動從動件盤形凸輪機構的實際凸輪廓線方程,亦可看作滾子直動從動件盤形凸輪機構的理論凸輪廓線方程。 2.3.2 滾子擺動從動件盤形凸輪機構中的凸輪設計
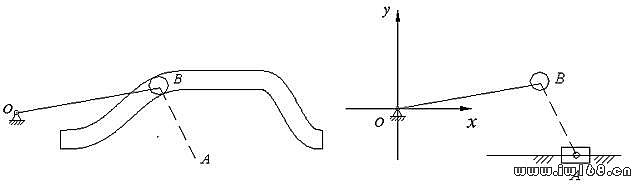
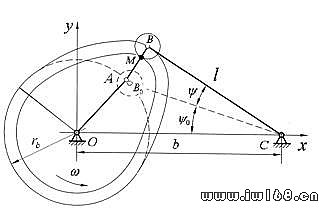
圖2.2所示滾子擺動從動件盤形凸輪機構,擺桿擺動中心C,桿長為l,機架OC長為b,從動件處於起始位置時,滾子中心處於B0點,擺桿與機架OC之間的夾角為 ,當凸輪轉過角后,從動件擺過角,滾子中心處於B點。
,當凸輪轉過角后,從動件擺過角,滾子中心處於B點。 凸輪機構高副低代后得到平面連桿機構OABC,從動桿BC上B點位移、速度、加速度矢量式為

 (2-17)
(2-17)圖2.2滾子擺動從動件盤形凸輪機構的高副低代
 (2-18)
(2-18) (2-19)
(2-19)式(2-17)中 。在文獻[10]中,從動件的角速度、角加速度在回程時為負,推程時為正,而此處逆時針為正,順時針為負,所以引用公式時,須添加負號。
。在文獻[10]中,從動件的角速度、角加速度在回程時為負,推程時為正,而此處逆時針為正,順時針為負,所以引用公式時,須添加負號。
由式(2-17)(2-18)(2-19)得
 (2-20)
(2-20)
 (2-21)
(2-21)AB桿的方向即從動件受力方向,從動件運動方向垂直於CB桿,凸輪機構壓力角為
 (2-22)
(2-22)點M處曲率半徑為即  (2-23)
(2-23)凸輪實際廓線上點M的向徑為 。將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑
。將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑  (2-24)
(2-24)式(2-24)分別點乘,得凸輪實際廓線的直角坐標方程  (2-25)
(2-25)用代換式(2-25)中的,得圓形刀具中心軌跡曲線直角坐標方程  (2-26)
(2-26)當取時,式(2-25)即尖底擺動從動件盤形凸輪機構的實際凸輪廓線方程,亦可看作滾子擺動從動件盤形凸輪機構的理論凸輪廓線方程。 2.3.3 平底直動從動件盤形凸輪機構中的凸輪設計
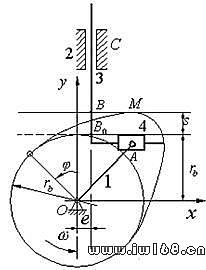
圖2.3平底直動從動件盤形凸輪機構的高副低代
平底從動件盤形凸輪機構高副元素的曲率中心分別位於凸輪廓該點曲率中心A和垂直於平底的無窮遠處,高副可用導路平行於平底的滑塊A表示。
圖2.3所示偏置平底直動從動件盤形凸輪機構,導路偏距e,平底中心初始位置處於B0點,當凸輪轉過角后,平底中心處於B點,。列從動件位移、速度、加速度矢量方程式  (2-27)
(2-27) (2-28)
(2-28)  (2-29)
(2-29) 矢量式(2-27)(2-28)(2-29)中有 六個未知量,
六個未知量, 可求,求得
可求,求得 。點M處曲率半徑
。點M處曲率半徑 ,即
,即  (2-30)
(2-30)平底與凸輪廓線接觸點M的向徑為 。將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑
。將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑
 (2-31)
(2-31)
式(2-31)分別點乘,得凸輪實際廓線的直角坐標方程  (2-32)
(2-32)刀具與凸輪廓點M接觸時,刀具中心Q必在AM方向,與點M相距。用 代換式(2-32)中的
代換式(2-32)中的 ,得圓形刀具中心軌跡曲線直角坐標方程
,得圓形刀具中心軌跡曲線直角坐標方程  (2-33)
(2-33) 顯然,平底直動從動件盤形凸輪機構中的凸輪輪廓與偏心距大小無關。
當平底垂直於從動件導路時,壓力角為
 (2-34)
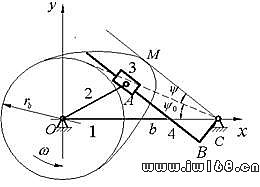
(2-34)2.3.4 平底擺動從動件盤形凸輪機構中的凸輪設計
圖2.4所示平底擺動從動件盤形凸輪機構,機架OC長為b,擺桿在虛線所示初始位置與機架OC之間的夾角為,當凸輪轉過角后,平底轉到CM處。此時代換機構從動件角位移、角速度、角加速度矢量方程式為  (2-35)
(2-35) (2-36)
(2-36) (2-37)
(2-37) 圖2.4平底擺動從動件盤形凸輪機構的設計
式(2-36)、(2-37)中 。
。 矢量式(2-35)(2-36)(2-37)中共有 六個未知量,
六個未知量,  可求,因推導需要一些技巧,此處給出較為詳細的推導過程。
可求,因推導需要一些技巧,此處給出較為詳細的推導過程。 將式(2-36)中各矢量旋轉 ,得
,得  (2-38)
(2-38)將式(2-35)(2-38)等號兩邊矢量兩兩相減,得
 (2-39)
(2-39) (2-40)
(2-40)將式(2-37)(2-38)等號兩邊矢量兩兩相加,得
 (2-41)
(2-41)由式(2-39)和 (2-41)可得
 (2-42)
(2-42)將式(2-42)等號兩邊同時點乘,得 ,則
,則  (2-43)
(2-43)將式(2-43)帶入式(2-39)中,得
 (2-44)
(2-44)點M處曲率半徑 即MA的長度,即
即MA的長度,即  (2-45)
(2-45)從動擺桿上M點的受力方向衡與速度方向一致,壓力角為
 (2-46)
(2-46)平底與凸輪廓線接觸點M的向徑為 。 將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑:
。 將該向徑反方向旋轉角,得凸輪處於初始位置時點M的向徑:
 (2-47)
(2-47)式(2-47)分別點乘后求得凸輪實際廓線的直角坐標方程  (2-48)
(2-48)刀具與凸輪廓點M接觸時,刀具中心Q必在AM方向,與點M相距,其向徑為  (2-49)
(2-49)直角坐標方程為
 (2-50)
(2-50) 2.4 圓柱/移動凸輪機構中的凸輪設計
圓柱凸輪屬空間凸輪機構,其輪廓曲線為一條空間曲線,不能直接在平面上表示。但在低速輕載的工作條件下,可以將圓柱面展開成平面,圓柱凸輪便成為平面移動凸輪,可以運用高副低代的方法對其進行設計。
2.4.1 直動推桿圓柱/移動凸輪機構中的凸輪設計
圖2.5a為直動推桿移動凸輪機構運動示意圖,也可看作將圓柱凸輪展開后,得到的機構運動示意圖,滾子中心B,滾子中心與凸輪廓線接觸點處的曲率中心為A。圖2.5b表示高副低代后得到的平面連桿機構,設圓柱凸輪半徑為R,速度,以滾子最低點o為圓心,以直動推桿升程方向為y軸,建立坐標系xoy,建立代換機構的速度、加速度矢量方程
 (2-51)
(2-51) (2-52)
(2-52)變換式(2-51)為
 (2-53)
(2-53)
圖2.5a 圖2.5b
圖2.5直動推桿圓柱/移動凸輪的高副低代
將式(2-53)等號兩邊分別點乘  ,並將所得二式等號兩邊分別相除,得
,並將所得二式等號兩邊分別相除,得  (2-54)
(2-54) 當 時,
時, 
當 時,
時,
AB桿的方向亦即從動件受力方向,從動件運動沿方向y軸方向,凸輪機構壓力角為
 (2-55)
(2-55) 由式(2-51)和(2-52),可求得
 (2-56)
(2-56)點M處曲率半徑為
 (2-57)
(2-57)從動滾子與凸輪輪廓接觸點M的向徑為
 (2-58)
(2-58)將該接觸點M沿凸輪平動方向的反向移動 ,得凸輪處於初始狀態時點M的位置,此時向徑
,得凸輪處於初始狀態時點M的位置,此時向徑  (2-59)
(2-59)將式(2-59)分別點乘,得凸輪實際廓線的直角坐標方程  (2-60)
(2-60)式(2-58)(2-59)(2-60)中“+”表示凸輪輪廓線上部,“-”表示凸輪輪廓線下部。
2.4.2 擺動推桿圓柱/移動凸輪機構中的凸輪設計
圖2.6a為擺動推桿移動凸輪機構運動示意,也可看作將擺動推桿圓柱凸輪機構中凸輪展開后,得到的機構運動示意圖,滾子中心B,滾子中心與凸輪廓線接觸點處的曲率中心為A。圖2.6 b表示高副低代后得到的平面連桿機構,設圓柱凸輪半徑為R,速度,擺稈的任一瞬時擺角,最大擺角為 ,擺角速度為
,擺角速度為 擺稈的迴轉中心o通常在擺動幅角的等分線上,以o為圓心,以凸輪移動方向為x軸,建立坐標系xoy,列代換機構的速度、加速度矢量方程
擺稈的迴轉中心o通常在擺動幅角的等分線上,以o為圓心,以凸輪移動方向為x軸,建立坐標系xoy,列代換機構的速度、加速度矢量方程 圖2.6擺動推桿圓柱/移動凸輪機構的高副低代
 (2-61)
(2-61) (2-62)
(2-62)式中 。
。 將式(2-61)中各矢量旋轉 后化為
后化為  (2-63)
(2-63)將式(2-63)等號兩邊分別點乘 ,並將所得二式等號兩邊分別相除,得  (2-64)
(2-64)AB桿的方向亦即從動件受力方向,從動件運動沿方向y軸方向,凸輪機構壓力角為
 (2-65)
(2-65) 由(2-62)(2-63)聯列可求得
 (2-66)
(2-66)
接觸點M處曲率半徑為
 (2-67)
(2-67)
從動滾子與凸輪輪廓接觸點M的向徑為
 (2-68)
(2-68)將該向徑沿展開凸輪平動方向的反向運動距離,即得凸輪處於初始位置時點M的向徑  (2-69)
(2-69)將式(2-67)分別點乘,得凸輪實際廓線的直角坐標方程  (2-70)
(2-70)式(2-68)(2-69)(2-70)中“+”對應著凸輪廓線上部,“-” 對應著凸輪廓線下部。
 時,
時,  ;當
;當 時,
時, ,
,
 ,
, 
 ,得
,得 。因
。因 ,可得
,可得