1. Inventor界面介紹
l 簡潔的工作環境
l 啟動引導模板
l Inventor文件格式
l 右鍵關聯菜單
l 按任務自動調整的智能型工具條和菜單系統
l Inventor項目設置
l 系統環境設置:工具 > 選項
l Inventor設計環境:零件設計、部件設計、工程圖設計和表達視圖設計(爆炸場景)
l Inventor零件造型的鈑金環境和實體造型環境(鈑金零件設計和實體零件設計)。
2. Inventor設計流程
l 草圖繪製
l 零件造型流程
l 部件裝配流程
l 輸出工程圖流程
l 創建表達視圖,輸齣動畫流程
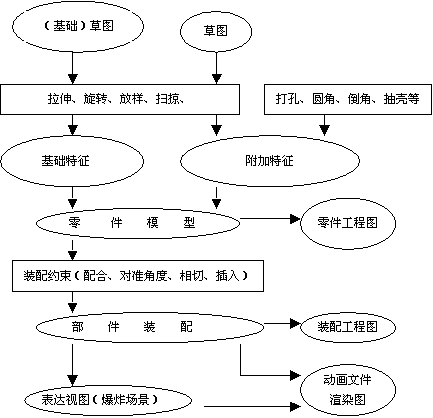
Inventor設計流程圖
3. Inventor零件設計
3.1 Inventor零件設計流程
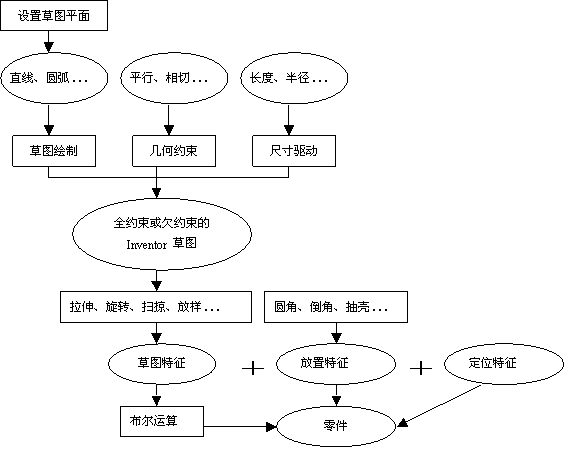
Inventor零件設計流程圖
3.2 Inventor零件設計:草圖繪製
l 簡潔的草圖繪製工具
l 基於“手勢”的繪圖
l 目標動態捕捉(提示符號)
l 約束的顯示、添加、刪除
l 尺寸標註、尺寸關聯
l 投影草圖
l 草圖的動態拖拽
(練習1)
繪製如圖所示的草圖。
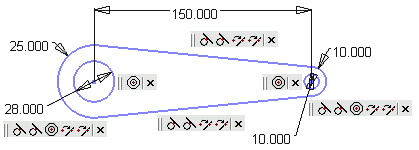
練習內容:
1. 基於手勢繪圖。
2. 使用自動捕捉。
3. 草圖尺寸標註。
4. 添加、刪除草圖約束。
達到要求:
1. 完成草圖的繪製。
2. 按給定尺寸完成草圖尺寸標註。
3. 通過添加/刪除約束,達到指定的約束形式和數目。
4. 該對稱草圖在窗口內,呈水平方向放置。
5. 完成時間為5到10分鐘。
3.3 Inventor零件設計:特徵建模
l 特徵的定義
l 特徵的分類
Ø 草圖特徵
Ø 放置特徵
Ø 定位特徵
Ø 陣列特徵
Ø 設計元素
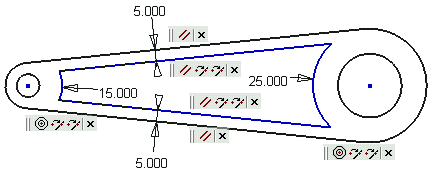
(練習2)
創建如圖所示的零件(連桿.ipt)。

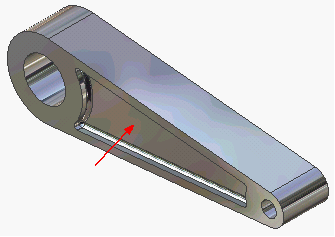
練習內容
1. 多重封閉截面輪廓的使用。
2. 練習創建草圖平面、定位特徵、在創建過程中調整觀察模式。
3. 造型練習。嘗試以不同的方法創建相同的零件。
4. 改變零件的材料、顏色等。
5. 特徵鏡像。
6. 設計元素的創建和引用。
7. 創建工程師記事本。
達到要求:
1. 完成零件幾何造型。
2. 按給定尺寸和約束完成減重槽的草圖。
3. 完成減重槽的創建並做鏡像特徵,觀察結果。
4. 用減重槽創建一個設計元素,嘗試不用鏡像而用插入設計元素的方法創建另一側的減重槽。
5. 調整零件材料、顏色,觀察顯示效果。
6. 完成時間為20到30分鐘。
4. 部件裝配設計
l 部件裝配環境介紹
l 自下而上和自上而下的裝配模式
l 在位編輯零件
l 裝配約束:配合、對準角度、相切、插入
l 基於裝配約束的零件拖動
l 約束驅動
4.1 Inventor部件裝配約束
l 裝配約束的本質:控制兩個零件之間的相對自由度
l 裝配約束的實現:兩零件的點、線、面之間的配合
l Inventor裝配約束類型
(練習3)
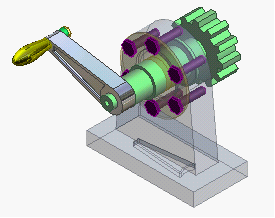
打開指定的部件文件【裝配.iam】,如下圖:
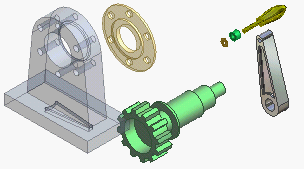
通過添加裝配約束,得到下面的部件:
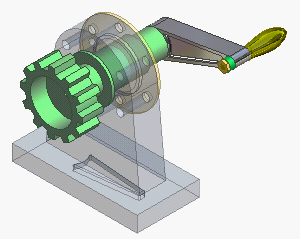
現在,缺少緊固件。請在此部件環境中,單擊滑鼠右鍵,從關聯菜單中選擇“裝入現有零部件”。基礎教程參照模型目錄中找到【螺栓.ipt】,在部件中調入一個這種螺栓,並完成裝配。然後,進行零部件陣列,並與【軸承蓋】或【機架】的陣列孔相關聯。結果如下:
裝配完成後,嘗試驅動裝配約束。操作按現場提示。
達到要求:
1. 正確理解Inventor裝配約束工具的含義。
2. 裝配約束的練習,完成部件裝配。
3. 理解帶有子部件的裝配關係和順序。
4. 正確理解裝配約束的驅動。
5. 正確理解參照運動的概念。
6. 練習時間20分鐘。
4.2 二維三維混合裝配設計
l 二維三維混合設計的需求
l 二維三維混合設計的優點
l 自適應裝配設計
l “在位”創建零部件
(練習4)
打開基礎教程參照模型目錄中的【2D3D.iam】。如下圖:
在圖形窗口的空白處單擊滑鼠右鍵,選擇“創建新零部件”,在位創建一個新零件。該零件命名為【Link.ipt】。
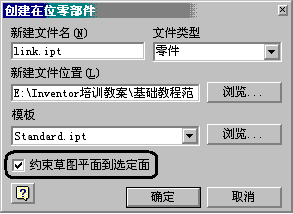
如圖選中“約束草圖平面到選定面”,然後單擊“確定”按鈕,將【link.ipt】的草圖平面選擇設置到【part2.ipt】的外表面上。繪製如下圖所示的草圖:
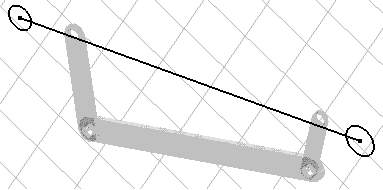
結束草圖的繪製,將草圖設為“自適應”狀態。然後結束對【link.ipt】的編輯。
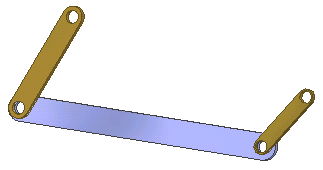
在部件中,以“角度約束”或“固定”的方式將【part2.ipt】和【part3.ipt】約束起來。然後將自適應狀態的【link.ipt】裝配上去(兩端軸線重合)。如下圖:
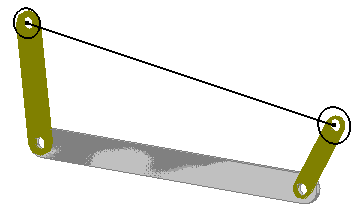
在裝配過程中【Link.ipt】發生了自動適應部件裝配的尺寸變化,為設計者計算尺寸提供了方便。
然後解除或抑制【part2.ipt】和【part3.ipt】的固定約束。拖動【part2.ipt】或【part3.ipt】零件,觀察該連桿機構的運動。我們看到:Inventor有檢查機構干涉卡死的能力。
最後,完成Link.ipt零件的實體創建。
達到要求:
1. 理解自上而下的部件設計。
2. 練習裝配約束。
3. 零部件在位創建和編輯。
4. 二維三維混合裝配。
5. 理解自適應設計。
6. 驅動約束練習。
7. 基於裝配約束的拖動,實現按自由度的機構模擬運動。
8. 練習時間:15分鐘。